
【导读】旋转变压器是机械或模拟传感器,可用来确定电机的绝对位置和速度。旋转变压器传感器可应用于恶劣的环境,帮助获得精确的角位置和速度数据。该类传感器常用于工业,汽车和航空行业——特别是在电机或传感器可能会被污染的恶劣环境中。
常见的污染物包括:油、污垢、食物颗粒,甚至是可能导致其他旋转感测技术无法实施的极端温度。特定的最终产品具有独特的设计挑战和要求,其中一些挑战和要求常见于大多数工业应用。其中两个挑战是:1)角位置和速度数据的绝对精度;2)最小化或消除电磁干扰(EMI)。
旋转变压器传感器的工业应用
一些绝对旋转传感技术(如光编码器)被多次选用于工业应用。然而, 当应付恶劣环境或出于低成本考虑时,旋转变压器是理想的选择。伺服电机常用于工业领域,与旋转变压器以及其他类型的位置传感器相连接。通常使用伺服电机和伺服驱动器与旋转变压器配合来实现角速度与位置测量的应用包括:
数控(CNC)和注塑机、升降机、机械手臂、电动交通工具(电动自行车、电动滑板车、电动轮椅等)、铁路运输、农业和建筑设备、公共汽车和重型卡车、高尔夫球车和低速电动车。
主要的旋转变压器传感系统要求
精确和及时的旋转变压器角度输出
在找到利用旋转变压器来减轻电磁干扰对工业系统的影响的方法之前,重要的是要先理解为什么精确的位置控制是必不可少的。旋转变压器提供一个理论上与无限解析度一样的模拟输出。模拟到数字的转换技术,通过将输出分割成块或步骤的程度来限制解析度。对持续角进行有限分割将导致定量错误。例如,您可以使用一个12位分辨率的转换器来提供角输出。转换器轴旋转一圈被分为4096步(2^12对应一个12位分辨率)。由于一度等于60分,所以旋转一圈(360度)等于21600角分(60x360)。则每步的间隔为5.27角分(21600/4096)。系统不可能提供比5.27角分更好的信息。
决定正确角位置的两个关键点是系统精度和系统稳定时间。后者主要指的是角输出要花多久才能显示出精确位置。需要对系统的每个部件进行评价,以确定限制因素。系统中,典型的误差精度是旋转变压器误差和旋转变压器模拟数字转换(RDC’s)误差的总和。最常见的是,3-10角分就会出现一个旋转变压器误差。再加上5.27角分会出现旋转变压器模拟数字转换误差,则我们可以得出精确的误差出现范围是8.27-15.27角分。因此,选择正确的RDC很重要。以下因素在典型的旋转变压器应用中会对系统精度和稳定时间产生影响 [1]:
机械因素
传感器的结构(零位电压、变压比等)
传感器规格随温度的变化
线圈不平衡:正弦和余弦线圈输出电压可能会不平衡,从而导致误差
旋转变压器传感器未对准:旋转变压器也许安装错误,导致系统静态误差
旋转变压器传感器的极的数量:由于每增加一对极就会多检测360度,因此增加的极数会降低角误差
电气因素
旋转变压器模拟-数字转换结构
旋转变压器信号输入到角输出的时间延迟,反应快速的角变化稳定时间
模拟前端(AFE)部件的不平衡
系统具备处理环境因素的能力(例如,外部磁场或共模噪音)
稳定时间
当旋转变压器的电机位置或输出信号变化迅速时,稳定时间是RDC控制系统的快速性能指标[2]。图1显示的一个是有阶跃输入变化(黑线)的RDC反馈控制系统的稳定时间的例子。蓝色信号显示的是对电路的正常模式响应,红色信号显示的是加速模式过程中响应(角快速变化)。为了在快速变化的条件下追踪到旋转角,加速模式帮助控制回路很容易跟踪到一个快速的旋转角[4]。
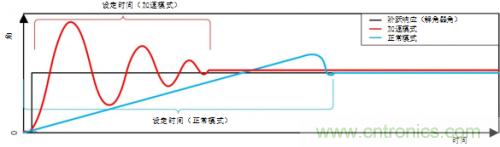
图 1:RDC阶跃响应稳定时间
EMC/EMI影响旋转变压器系统
电磁兼容性(EMC)指的是:电子系统要怎样在电磁环境中运行而不产生问题(免疫力)。同样地,系统发射脉冲一定不能干扰到范围中的任何产品。在工业设备应用中,变速驱动器和控制电路是主要干扰源。功率元件的快速切换,例如绝缘栅双极型晶体管(IGBT)和微控制器,是高频发射或干扰的主要来源。IGBT切换时间可长达100nS。
电气设备应该不受高频现象影响,例如:
1.静电放电(ESD)
2.快速瞬变(也称为EFT)
3.辐射电磁场
4.传导射频干扰
5.浪涌脉冲
限制条件由工业标准决定,例如IEC61800-3标准规定了包含AC/DC电机和控制电路的变速驱动器的电磁兼容性要求。在这样的环境下,任何设计都应该遵守确定的基本电气设计原则,以减轻噪声影响[3]。
1.电子PCB原理图和布局设计:
a.分别进行电源和模拟接地
b.使用模拟滤波器来消除感测器信号上的共模噪音
c.针对高频干扰(如:铁氧体磁珠)的高频、低阻抗滤波器
d.最小化回环面积,以便接地可以为信号返回路径提供尽可能低的阻抗
2.机械设计:
a.使用铠装的电缆和连接器(例如DB-9铠装连接器)
b.布线:最小化驱动器和感测器部件之间的电缆长度
c.使用铠装双绞电源和控制电缆来避免干扰
d.使用双铠装来降低辐射干扰
变速驱动器的电磁干扰免疫力要求
TI工程师测试IEC61800-3标准来获取环境规范(表1)。该设计使用铠装连接器和铠装电缆(长度>30m)。标准的定义见表2。
环境2
连接器 测试对象 基准 水平 标准
柜/箱 ESD IEC61000-4-2 4kV (8kV) CD or 8kV (15kV) AD 1) B
辐射RF IEC61000-4-3 80-1000MHz, 10V/m, 80% AM (1kHz) A
控制信号和DC辅助电源接口 <60V EFT IEC61000-4-4 ±2kV (4kV)/5kHz,电容耦合 B
浪涌1,2/50us, 8/20us IEC61000-4-5 ±1kV (2kV):铠装电缆(2Ohm/500A);最小长度:20m B
传导RF IEC61000-4-6 0.15-80 MHz, 10V/m, 80% AM (1kHz) A
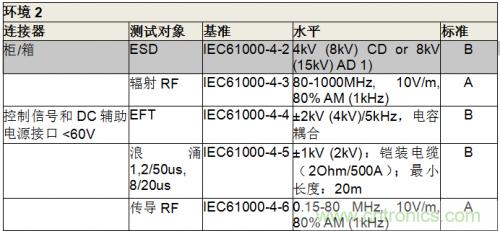
表1:IEC61800-3规定的变速驱动器的EMC规范
等级 性能(通过)标准
A 该模块应像预期的那样持续运行。甚至在测试时没有功能或性能缺失。
B 暂时的性能降级可以接受。测试后,该模块应像预期的那样持续运行且不需要手动干预。
C 在测试过程中,在不损坏硬件或软件的前提下,功能缺失可以接受。测试后,该模块应在手动启动或关闭后能像预期的那样持续运行。
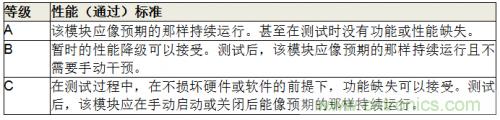
表2:IEC61800-3通过性能标准
EMI结果来自哪里?
任何高dl/dt或dV/dt都可能作为电磁干扰(EMI)的重要潜在源头。电子信号的EDGE率可以产生谐波和互调失真。例如,一边10ns的EDGE率和另一边1ns的EDGE率导致10MHz的方波。这展示了增加的谐波含量如何伴随具有更快Edge Rate的方波。使用等式1作为一个计算特定Edge Rate下的谐波频率范围的一般公式:
(1)
根据该公式,10nsEdge Rate对应的谐波频率大约为31.8MHz。图3显示:最后一个重要的谐波频率为30MHZ。同时,1ns的Edge Rate对应的谐波频率318MHZ(图2)。如果频率范围扩展到300MHZ以外,显示的谐波仍很明显,但却在相关频率上迅速变小。
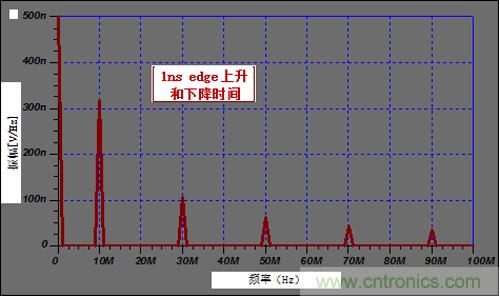
图 2:10MHz方波频谱
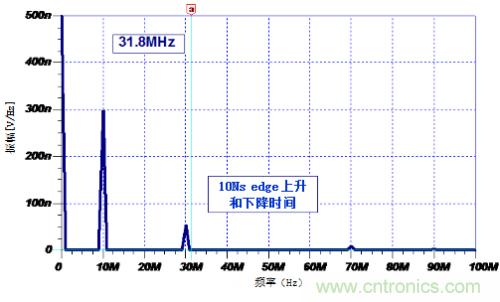
图 3:31.8MHz方波频谱
这些方法可以帮助降低噪音对旋转变压器系统精度的整体影响:
1.使用差分信号帮助减少电缆中的电气噪音
2.铠装线缆噪音在影响传感器电路和产生误差之前传入地下
3.在RDC结构中使用的模拟前端(AFE)可以过滤掉共模噪音
4.争取获得具有尽可能低阻抗的接近完美的接地方式
5.尽可能缩小扮演EMI天线角色的环路
屏蔽和过滤
所有导电的部件,如电缆、地、金属外壳等,可以传播辐射。电缆的转移阻抗必须在频率达到100MHz的范围内低于100 mΩ/m。最高的屏蔽效果可以使用金属导管或波纹铝屏蔽层实现。电缆路径越长,要求的转移阻抗越低。可以在信号电缆中使用共模电感器,以在一个特定功率上抑制共模干扰。一个理想的共模电感器不会一直差模信号。Faraday Cage(法拉第笼)技术是另一个常用的控制辐射干扰的方法。

图 4:抑制共模噪音的扼流实例
结论
工业电机位置传感应用中的独特高精度与噪音挑战,可以通过全面的设计考量和仔细的电子元件选择来解决。设计旋转变压器时,设计师应考虑系统稳定时间的规范、有关EMI/EMC的芯片性能以及这些因素如何影响整体的系统精度。

