
【导读】国内第一条安装地铁屏蔽门的是广州地铁二号线,随后在国内10几个一线城市得到普及,国内多家屏蔽门生产企业也逐渐打破了其核心技术被国外几家企业垄断的局面,我国自主开创的现行的轨道交通安全门系统驱动电机控制方案领先于世界。
地铁屏蔽门是安装于地铁站台靠轨道侧边沿,把站台区域与轨道区域相互隔离开的设备。设置屏蔽门的主要目的是防止人员跌落轨道产生意外事故,降低车站空调通风系统的运行能耗,同时减少列车运行噪声和活塞风对车站的影响,为乘客提供一个安全、舒适的候车环境,提高地铁的服务水平。

我国自2002年广州地铁2号线引进屏蔽门系统以来,地铁屏蔽门(安全门)系统在全国各地10几个城市新建线路上得到了广泛应用,它的投入使用极大的改善了地铁车站的舒适性,加强了乘客和地铁相关设备的安全性,提升了地铁运营的服务质量,使地铁站台屏蔽门安全门专业逐渐成为地铁建设的标准配置。站台安全门的在国内地铁10年的应用历程也逐步经历了国外引进、局部仿制、全套国产化的曲折经历,其中门机系统的国产化是其中至关重要的环节,其国产化选型的合理性和科学性,直接影响安全门的使用效果和经济成本,本文从理论角度,通过推导计算对国产化电机方案进行了比选和选型关键数据分析和计算。
1. 地铁安全门的运动特性
地铁安全门系统门主要由门体(框架结构)、门机系统(传动件及电机)、门控制系统(DCU及PEDC)组成。其中门机系统承担着安全门系统的主要运动功能,是安全门可靠、稳定运行的主要保障,门机中驱动电机的国产化选型和参数计算在安全门系统方案中举足轻重,合理的选型及参数计算是整个系统设计的基础,现本文从运动学和电机学方面浅析一下驱动电机方案比选及参数计算:
2. 地铁站台安全门运动模型
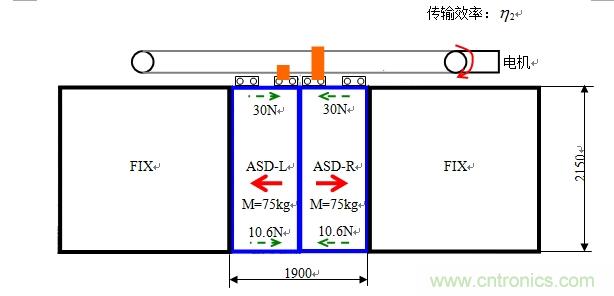
地铁站台安全门主要工作原理为驱动电机M通过减速器(减速比为1:10),带动正时皮带主动轮A(直径为50.93mm),主动轮转动通过皮带带动左右两扇滑动门(ASD-L,ASD-R),在行程为1900mm的范围内进行往复开关门运动。
[page]
3. 电机种类选型:
根据地铁安全门的运动特点,宜选用调速性能较好、安全、易于维护的电机。目前可用于自动门控制的电机基本为以下三种:
l 直流无刷电机:BLDC;
l 永磁同步电机:PMSM;
l 三相异步电机:ACIM(有时也称为感应电机)。
3.1. 直流无刷电机控制系统
在一般直流电机中有,定子励磁绕组,转子绕组。通过换向器和电刷将转子中的电流反向来产生旋转运动。这种电机因为有电刷,在运行中会出现磨损,目前不 建议使用。为了克服这种机械磨损,与之相反,在BLDC电机中绕组在定子上而转子是永磁体,这就是为什么选择BLDC。这种电机的优点是:
l 消除了机械换向器和碳刷,这将极大增强机械的可靠性。
l 直流有刷电机的换向哭和碳刷会导致火花,因此这些部件的消除意味着BLDC电机可以恶劣的环境中。
l 由于BLDC电机绕组铀耗I2R发生在定子中。因此可方便通过电机外壳进行散热。
BLDC电机的定子绕组采用整距集中绕组。绕组的相数有二、三、四、五相,但应用最多的是三相或四相。考虑到成本,一般采用三相即可。
l 绕组利用率:不像普通直流电机那样,BLDC的绕组是断续通电的。适当地提高绕组通电利用率将可以是同时通电导体数增加,使电阻下降,提高效率。从这个角度来看,三相比四相好,四相比五相好。
l 转矩的波动:BLDC电机的输出转矩波动比普通直流电机大,因此希望尽量减少转矩波动。一般相数越多,转矩的波动越小。
l 电路成本:相数越多,驱动电路所使用的开关管越多,成本越高。而且电机结构也越复杂。
对电机控制系统的拓扑结构一般也有以下几种:
l 无速度传感哭的控制系统,一般有电流传感器;
l 有速度传感器的控制系统,一般无电流传感器;
l 有速度传感器的控制系统,一般有电流传感器。根据我们建议采用双传感器的电机控制系统。这样即可以进行位置控制,也能进行转矩控制。
l BLDC电机的缺点是:转矩的波动大,噪声大,控制精度低,过载成能差。
l BLDC电机的优点是:价格便宜,控制算法简单并容易实现。
3.2. 永磁同步电机控制系统
由于具有体积小、控制方便和高效率的特点,许多工业应用都采用BLDC电机。BLDC愈来愈多地出现在汽车应用领域。但在高性能应用中,如机床设备和低噪声风机应用中,平衡的转矩输出是至关重要的。
BLDC难以应用在需要低转矩脉动和低噪声运行的场合。BLDC电机中绕组的梯形分布将在电机运行过程中导致转矩脉动,这是由于产生的电流也是梯形分 布的。这种转矩肪动将导致小的转速振荡而产生音频噪声。另一方面,弦反电动势的BLDC电机,也称作永磁同步电机(PMSM),采用正弦电流进行驱动,在 减小了转矩脉动,从而将音频噪声降低到最小限度。
l PMSM电机的优点是:体积小、控制精度高。
l PMSM电机的缺点是:容易退磁,电机造价高。
3.3. 三相异步电机(ACIM)控制系统
l ACIM电机的优点是:可靠性高,免维护,电机造价低;
l ACIM电机的缺点是:体积大,控制算法复杂并不容易实现。
3.4. BLDC电机控制方法
根据前三点分析,结合地铁屏蔽门运动需求,控制精度,选用BLDC电机可获得最优性价比。
BLDC电机的工作模式由DCU输出的PWM信号进行控制。安全门的运动是由门控单元DCU控制的。电机正反向的控制由六个MOSFET组成的电路控制,滑动门运行各阶段所需的速度和力矩由DCU输出的PWM信号控制。电机驱动原理图如下所示:
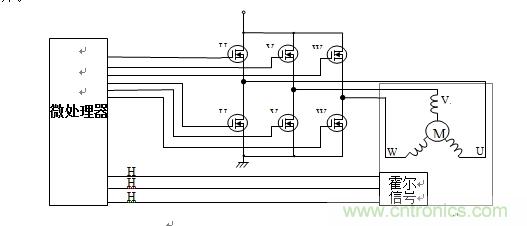
图2:电机驱动原理图
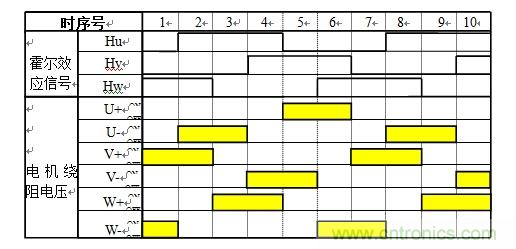
图3:时序图
PWM信号按照下图所示时序控制U+,V+,W+,U-,V-,W-这六个MOSFET管的导通和截止,可在转子运动空间内产生一个正向旋转的磁场,转 子跟随旋转磁场运动,实现电机的正转,时序脉冲的转换间隔越短,电机转速越快。同理,使旋转磁场反向运动,即可实现电机的反转。
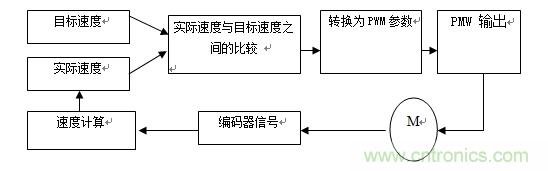
图4 :速度控制方框图
开门过程:
列车到达车站,DCU接到开门命令,输出预设PWM信号,同时不断获取电机编码器的霍尔效应信号,得到门位置和门速信息,再将所测门速信息与该门位置 的预设速度进行比较,用比较结果调节PWM信号参数,改变PWM输出的脉冲宽度,相应的电机转速和力矩不断变化,使滑动门按照预设的开门曲线依次实现加速 运行阶段、匀速运行阶段、减速运行阶段、缓慢接近开门限位,最终,滑动门停止在全开限位位置。
开门速度曲线:
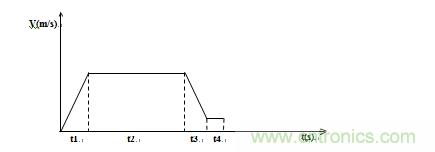
t2:达到高速匀速运动
t3:开门接近限位减速过程
t4:缓慢运动达到限位
关门过程:
关门过程电机转动方向和开门过程电机转动方向相反,在匀速减速后多了一个低速运行段,经历加速运行阶段、匀速运行阶段、减速运行阶段、低速运行阶段,各阶段运行均由DCU输出的PWM信号控制。各阶段的运行参数可根据实际情况灵活设置。
关门速度曲线:
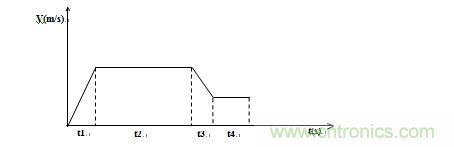
t1:关门加速过程
t2:达到高速匀速运动
t3:由高速至慢速关门减速过程
t4:慢速关门至门关闭限位
[page]
4. 电机参数的选型计算
电机在选型时需要根据电机安装空间、额定电压、额定功率、环境要求(温度、湿度、振动、散热能力、有无轴向和径向负载、工作类型(连续,间歇,或者周期性运行)等指标进行初步选型。
考虑根据提高运营效率,滑动门开关门过程中需要在很短的时间内加速到高速运行阶段。因此应确保电机可提供足够的加速力矩,选定电机的最大输出扭矩应大 于滑动门的加速时所需的最大力矩。为使滑动门可在固定的时间内完成开关门动作,滑动门的最高运行速度也是一个重要的因素,因此还需注意电机所能输出的最高 转速。针对相应的门体自重和摩擦阻力进行功率、转矩和转速的计算,再根据电机的参数中的电流—转速—转矩曲线,选定合适的电机。
选定的BLDC电机的T-N-I曲线如下:
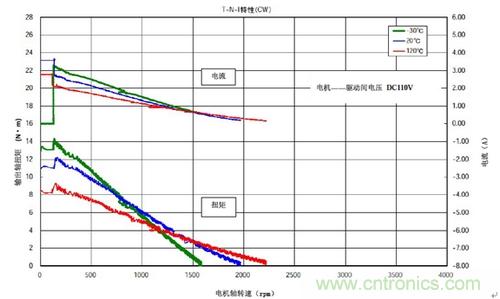
在电机选型计算重点是电机的带载能力计算,主要是电机的扭矩计算和转速计算。
在配置一台合适的电机时,确定所需转矩对于防止电机过载运转时出现热过载至关重要
以下根据地铁安全门电机拖动模型着重计算一下电机的功率和扭矩。
滑动门运动曲线特性计算电机等效功率如下:
1)已知条件
a) 门重量
重量: M=75kg/leaf
b) 机械条件
导靴阻力:10.6N/leaf
开门阻力(不用马达和传送带): 30N/leaf
正时滑轮A直径: D=50.93mm
门机最大输出效率(DCM):=0.95
滑轮和同步传送带传输效率:=0.9
其他条件:开关频率:每3分钟开关一次
另外根据中华人民共和国城镇建设行业标准CJ/T 236-2006 城市轨道交通站台屏蔽门标准,及相关地铁运营方要求,以北京地铁目前投入使用的地铁目前使用的B型车为例(车门宽度1300mm):
(1) 滑动门开门行程时间:2.5±0.1s~3.5±0.1s范围内无级可调
(2) 滑动门关门行程时间:3.0±0.1s~4.0±0.1s范围内无级可调
(3) 滑动门运动的动能:关门过程中,在最后100mm的行程中动能不应超过1J/扇门。
(4) 在行程中的最大动能不能超过10J/扇门
(5) 停车精度±300mm.
还可知如下限定条件:
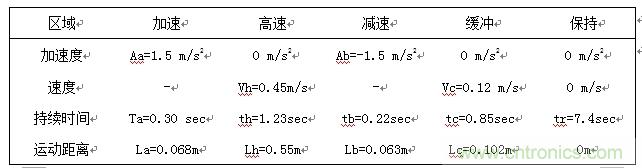
电机最大速度 Vh=0.45米
门开度:1300mm+600mm=1.9m
电机冲程: L=1.9/2=0.95m
最小开门/关门时间: 2.5 秒/3.秒
末端速度V
关门速度曲线参数
[page]
5. 控制系统方案
5.1. 需求分析
表 1:某电机参数表
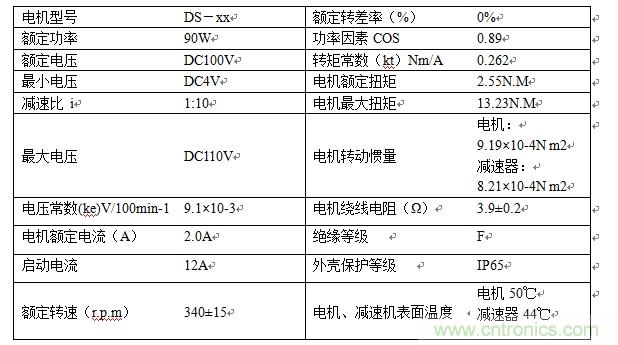

其中:
P=额定功率,单位W
T=额定转矩,单位Nm
n=额定转速,单位rpm
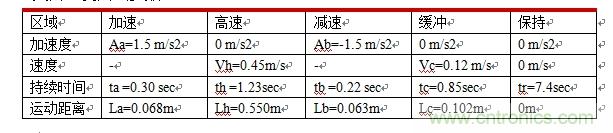
表2:速度曲线
根据机械条件:
l 导槽阻力:10.6N/leaf
l 开门阻力:30N/leaf''''''''
从而得知:门体阻力:R=(10.6+30)×2=81.2N
5.2. 计算过程
滑动门加速所需要的力Fa为:
∵Fa-R=ma(m=门体质量,M=75kg/leaf;a=开门加速度,在表2为查得Aa=1.5m/s2)

∴ 其中:效率η=门机最大输出效率(DCM)×滑轮和同步传送带传输效率=0.95×0.9=0.855
滑动门加速所需要的电机转矩Ta为:

Ta=Fa×r=358.128(N)×0.0255(m)=9.132NM(满足最大转矩Tmax=13.23Nm)
滑动门高速时所需要的电机转矩Th为:
Th=Fa×r=358.128(N)×0.025(m)=2.07NM
若考虑到效率,则Th÷η=2.07÷0.855=2.42NM
可满足额定转矩To=2.55(Nm)

其中:
W=重量,单位:kg
ν=速度,单位:m/s
ω=动量,单位:J

P=功率,单位:W
T=时间,单位:s
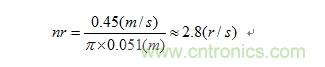
线速Vh=0.45m/s,则转速为:
6. 结论
根据地铁屏蔽门运动需求,控制精度,综合以上条件得出结论,选用额定功率90W左右BLDC电机即可获得最优性价比。

