
- 升压电路设计特色
- 升压电路操作模式
- 驱动电路的线性调光能力
- 闭回路控制电路的设计
- 芯片补偿网络控制
升压电路设计特色
升压电路是用来驱动LED的串联电压高于输入电压(图1),并且有以下的特色:
1.此电路可被设计在效率高于90%下操作。
2.M=SFET的(Source)与LED串共地,这简化了LED电流的侦测(不像降压电路必须选择上侧FET驱动电路或上测电流侦测。但是升压电路也有些缺点,特别是用于LED驱动,由于LED串的低动态阻抗)。
3.输入电流是连续的,使得输入电流的滤波变得简单许多(并更容易符合传导式EMI标准的要求)。
4.关闭用的FET毁损不会导致LED也被烧毁。
5.升压电路的输出电流为脉冲式波形,因此,必须加大输出电容以降低LED串的涟波电流。
6.但是过大的输出电容,使得PWM调光控制变得更具挑战,当控制升压电路开与关,以达到PWM调光控制,就表示输出电流会被每一个PWM调光控制周期充放电,这使得LED串电流的上升与下降时间会拉大。
7.峰电流控制方式的升压电路,用以控制LED电流是无法达成的,需要闭回路方式使电路稳定,这又使得PWM调光控制更为复杂,控制电路必须增加频宽来达到所需要的反应时间。
8.当输出端短路,控制电路无法避免输出电流的增加,即使关掉Q1FET仍对输出短路毫无影响,并且输入端电压的瞬变造成输入端电压的增加量大于LED串联电压时过大的涌浪电流可能会造成LED的毁损。
图1BoostConverterLEDDriver
升压电路操作模式
升压电路可操作于二种模式,连续导通模式(ContinuousConductionMode;CCM)或不连续导通模式(DiscontinuousConductionMode;DCM),这二种模式是由电感电流的波形决定的。图2a为CCM升压电路的电感电流波形,图2bDCM升压电路的电感电流波形。
CCM升压电路是用在最大升压比例(输出电压与输入电压比值)小于或等于6,并在输入电流大于1安培的情形下,假如需要更大的升压比例,则需采用DCM模式。但是DCM模式会产生较大的峰值电流,因此导致电感的毁损增加,同时也造成均方根电流的增加。所以,DCM升压电路的效率要比CCM升压电路来得低,这也使得DCM的输出功率受限制。

图2升压电路的连续导通模式与不连续导通模式
以SupertexHV9911为例设计升压LED驱动电路
HV9911为CloseLoop,PeakCurrentControl,SwitchingModeLED驱动电源控制IC,它内建了许多功能来客服升压电路的缺点。HV9911包含了9-250VDC输入电压稳压器,不需额外电源,仅由单一输入电压提供IC动作的工作电源。它内建了2%精密的参考电压(全温度范围)能精确地控制LED串联电流。并且包含了断路用的FET驱动电路。当输出短路或过电压时,便会自动断开LED串之对地路径。此功能缩短了控制电路的反应时间(请参考PWM调光电路说明)。(图3)
HV9911控制电路的功能
图3HV9911内部电路结构
[page]
IC内部提供稳压电路9∼250V输入电压,可输出7.75V电压输出提供IC内部电源使用,若输入电压范围提升可经由外接一个200V,2WZenerDiode于输入电压与IC的Vinpin之间(如图1-4),这可使得输入电压范围可提升至450VDC,亦可以使得IC内部稳压电路所产生的功率损耗分散一部份在ZenerDiode上。
图4IncreasingtheInputVoltageRating
IC的VDDpin工作电压可提高(如果有必要的话)藉由一个二极管连接至外部电压,此二极管是避免将外部电压若低于IC内部稳压电路的输出电压时,会造成IC的烧毁,最大的外接静态稳定电压为12V(瞬态电压为13.5V),因此11V+/-5%的电压源是理想的外部提升电压值。
IC内部提供1.25%、2%精密参考电压,这参考电压可用来设定电流参考位准,以及输入电流限制位准,此参考电压也同时提供IC内部设定过电压保护。
振荡电路时间模式
振荡电路可经由外部电阻设定振荡频率。若此电阻跨接于RT及GNDpins之间,则IC操作于定频模式,另外,若电阻跨接于RT与GATEpins间,则IC操作于固定关闭时间模式(此模式不需要斜率补偿控制使电路稳定)。定频时间或关闭时间可设定于2.8ms到40ms之间,可运用IC规格书内的计算式设定。
于定频操作模式下,将所有SYNC在一起,多个IC可操作在单一频率。少数个案必须外加一个大电阻2300于SYNC到GND之间,用来抑制杂散电容所造成的振铃,当所有SYNC连接在一起时,建议使用相同电阻值跨接于每一个IC的RT与GND之间的电阻。
闭回路控制的形成是连接输出电流信号至FDBKpin,同时将电流参考位准连接至IREFpin,补偿网络连接至Comppin(传导运算放大器的输出端),如图5所示。放大器的输出受PWM调光信号所控制,当PWM调光信号为High时放大器的输端连接至补偿网络,当PWM调光信号为Low时,放大器的输出端与补偿网络被切断,因此补偿网络内的电容电压维持住,一直到PWM调光信号再度回复High准位时,补偿网络才又连接图放大器的输出端,这样可确保电路动作正常以及获得非常良好的PWM调光反应,而不需要设计一个快速的控制电路。
图5FeedbackCompensation
FAULT信号保护驱动电路
FAULT信号pin可用于驱动外部断接FET(图6)IC启动时,FAULT信号维持Low电位,IC启动过后,此pin被pulledhigh,这使得内电路的LED与升压电路连接,电路完成启动点亮LED,假如输出端有过电压或短路情形发生,内部电路会将FAULT信号拉Low并使LED与升压电路断接。
FAULT信号也控于PWM调光控制信号,PWM调光信号为Low时,FAULT信号亦为Low,但当PWM调光信号为High时,FAULT信号却不见得为High。
[page]
断接LED时,可确保输出电容不会随着PWM调光信号的周期而充放电。
PWM调光信号到FAULT信号与保护电路的输出以AND连接着,以确保保护电路动作时能够覆盖过PWM及调光控制的输入。
图6DisconnectFET
输出短路保护的动作原理是当输出侦测电流(于FDBKpin),大于2倍参考电流设定位准(于IREFpin),保护动作会发生。过电压保护的动作原理,是当OVPpin的电压大于1.25V时,保护动作也会发生。二个信号被送至一个OR闸再送到保护栓锁电路。当有任一保护动作发生时,栓锁电路会将GATE及FAULTpins同时关掉。一旦有保护动作发生时,必须将电源关掉重开,才能使栓锁电路恢复重置。
而在IC的启动需要注意以下两点:
当VDD与PWMDpins连接在一起,透过电路上的输入电压的连接或断接来启动时,IREFpin所连接的电容必须使用0.1uF,而V00pin上所连接的电容值需小于1uF以确保适当的启动。
假使电路使用外部信号启动或关闭,而输入电压一直保持常开启时,则IREF及VDD所使用的电容值可增加。
线性调光能力
调整IREFpin的电压位准可达到达成输出电流的线性调整,方法为以可变电阻或分压电阻网络或外部提供参考电压连接至IREFpin。但是,要注意一旦IREF的电压低到非常小时,IC的短路电流保护比较器的误差电压(OFFSET)可能会造成短路保护发生误动作,这时候必须将IC电源关掉重开,重新启动电路,为了避免此误动作,IREF的最低电压为20∼30mV。
PWM调光(脉宽调变调光)能力
HV9910内部的PWM调光功能却能够达到非常快速的PWM调光反应,克服了传统升压电路不能非常快速的PWM调光的缺点。
PWMD控制IC内部三个点:
●GATE信号到开关FET
●FAULT信号到断接FET
●运算放大器到补偿网络的输出端
当PWMD信号为High时,GATE信号与FAULT可以动作,同时运算放大器的输出端连接到补偿网络,这使得升压电路可以正常动作。
当PWMD信号为Low时,GATE信号与FAULT被停止动作,能量无法从输入端转移到输出端,但是,为避免输出电容放电到LED而造成LED电流下降时间被拉长。
这个放电电容同时也会使得电路重新连接动作时,LED电流的上升时间会被拉长。因此,避免输出电容的放电是相当重要的。IC输出FAULT信号断接FET,使得LED的电流几乎立刻的下降到零电流,因此输出电容并没有被放电,所以当PWMD信号回复High位准时输出电容不需要额外的充电电流,这使得上升时间非常快速。
当PWMD信号为Low时,输出电流降至零,这使得回授放大器看到了相当大的误差信号于放大器输入端,会造成补偿回路的电容器上的电压会上升至最高电位。因此当PWMD信号回到High时,过高的补偿回路电压会控制电感峰值电流,而造成相当大的输出涌浪电流发生在LED上。
这样大的LED电流又随着控制回路速度而回授,这会使得稳定时间被延长,当PWMD信号为Low时,断开运算放大器与补偿回路是有助于维持补偿回路的电压不被改变。因此当PWMD信号回复High时,电路立刻回复稳态而不会产生过大的LED电流。
闭回路控制电路的设计
补偿回路可用来使得升压电路稳定的操作,可选用Type-Ⅰ补偿(一个简单积分电路)或者TypeⅡ补偿(一个积分电路及额外的极点-零点)。补偿的类型需要视功率级的交越频率的相位而定。
闭回路系统(图7)的回路增益如下:
Gm为运算放大器的增益(435mA/V)
Zs(s)为补偿网络的阻抗
Gp(s)为功率级的转移函式
请注意,虽然电阻分压比值为1:14,但是整体效应包含二极管的压降会是1:15。
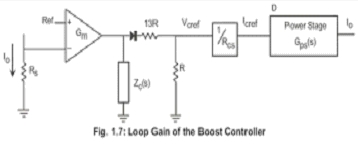
图7LoopGainof theBoostController
芯片补偿网络控制
假设Fc为回路增益的交越频率,而功率级的转移函式在此频率的振幅与相位角度为Aps与Φps、相位边限Φm所需增加的相位角度为Φboost。
(公式2)Φboost=Φm-Φpx-90º
基于所需增加的相位角度,来决定需要何种类型的补偿网络。
Φboost≦0º→TypeⅠ控制
0º≦Φboost≦90º→TypeⅡ控制
90º≦Φboost≦180º→TypeⅢ控制
HV9911为基础的LDE升压驱动电路通常并不需要TypeⅢ控制,所以此篇不讨论Ⅲ控制。HV9911TypeⅠ及TypeⅡ控制的使用,请参考表1。[page]

表1NetworkCompensation
TypeⅠ控制的设计相当简单,只要调整Cc即可,因为交越频率的回路增益之振幅为1
(公式4)Rs•Gm•(2πfcCc)•1/15•1/Rcs•Aps=1
由上述等式,若其它参数值已知Cc的电容值可计算出。
TypeⅡ控制的等式需被设计如下:
(公式5)K=tan(45?+Φboost/2)
(公式6)ωz=1/RzCz=2πfc/K
(公式7)ωp=Cz+cZ=(2πfc)•K
可得到交越率的回路增益之振幅为1的等式如下:
(公式8)
同时解等式(1-6)(1-8)可计算出Rz,Cz及Cc的值。
利用芯片实际设计出驱动电路
表2驱动电路设计参数表
图8驱动电路设计参考
对于低压应用(输出电压<100V),中等功率输出(<30w),开关频率设为200kHz(时间周期为5ms),对于开关损失以及外部零件的大小来说是个不错的折衷方案。若是更高的电压应用或更高的输出功率,则考虑外部的开关FET的功率损失,就必须降低开关频率。

