
中心议题:
- 电动车控制器的电路构成
- 电动车控制器电路的软件分析
- 电动车控制器的改进措施
解决方案:
- 双闭环控制
- 判断是否为“过冲”来选择不同的程序运行
电动车在上坡时速度会减小而电流会增大,在由上坡驶入平路或下坡的情况下由于阻力突然减小甚至消失,而驱动电流仍然较大,使得速度会快速增大,出现所谓的“过冲”现象。这给操作者带来不适且有一定的危险性。为了减轻或消除“过冲”现象,从硬件和软件两方面做出改进。对于非“过冲”时使用“调速控制”,通过调整驱动电流,力求使速度达到操作者通过转把设定的速度,并进行双闭环控制以克服复杂的路况变化。在“过冲”时采用“定速控制”,依据速度信号来调整驱动电流,在设定的时间内使速度保持不变。
调速控制控制器作为电动车的关键部件,其技术日臻成熟,但是仍然有一些问题有待解决。其中一个普遍的现象就是,电动车在上坡时速度减小而电流增大。在由上坡驶入平路或下坡的情况下由于阻力突然减小甚至消失,而驱动电流仍然较大,使得速度会快速增大,出现所谓的“过冲”现象。我们把这种现象叫做上坡“过冲”。这种情况会给操作者带来不适且有一定的危险性。为了减轻或者消除这种现象,有必要对设计做些改进。
1 电路构成
使用无刷电动机的电动自行车控制器主要分为以使用专用控制芯片为核心的纯硬件电路控制器(例如以MC33035 为核心的控制器)和以MCU 为核心的控制器(例如以AT89S2051、P87LPC767、STCl2C5410AD 等为核心的控制器)。采用的直流无刷电机多半是三相电机,电角度有60°和120°两种。电机极数大部分为18 极,也有16 极、20 极等。
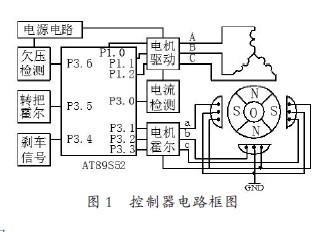
图1 是一款以AT89S52 为核心的一个控制器电路框图,电动机是电角度为120°直流无刷三相电动机。该电路中单片机接收电源电压检测信号、刹车信号、电机电流检测信号、转把(调速)信号、电机转速检测信号、转子位置检测信号等,判断电动机转速是否符合要求、三相绕组A、B、C 与位置信号a、b、c 之间的对应关系是否正确等,动态的输出PWM 形式的控制信号,控制相应的功率驱动管的导通或关断,控制电动机的起动或停止、加速或减速等,并输出各种指示信号,如刹车信号、左转/右转信号、欠压报警信号等。对于采用MCU 为核心的控制器,一般的是以软件编程来实现。
1)转把的形式、信号特征:转把(转速)信号是操作者发出的速度控制指令信号。此电动自行车使用“霍耳转把”。以5V 供电、正把、输出信号为1.1~4.2V。转动转把,改变了霍耳元件周围的磁场强度,也就改变了霍耳转把的输出电压。
2)闸把的形式、刹车信号特征:电动车闸把上有闸把位置传感元件,在捏刹车把动作时,将刹车信号传给控制器,控制器接收到刹车信号后,立即停止对电机的供电。
[page]
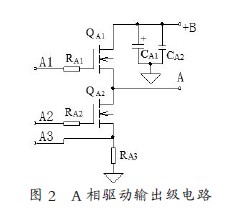
3)直流无刷电机的驱动控制:参见图1,此电路采用三相无刷直流电机。3 个霍尔位置传感器的空间间距为120o,输出信号a、b、c最终送给单片机作为转子位置检测信号及测速信号。其中A 相末级电路如图2 所示,在驱动电路中设置了电流检测。单片机根据霍尔转速信号和电流检测信号,经过分析判断,输出正确的PWM 控制信号给相应的线圈通电,从而控制电动机的起动、停止及转速等。
4)欠压保护和过流保护:当电池电压降低到控制器设定值以下时,单片机停止PWM 信号的输出,以保护电池不至于在低电压情况下放电。
限流保护(或过流保护)电路对控制器输出的最大电流进行限制,以保护电池、控制器、电动机等不会出现允许范围以上的电流。
一个最基本的电动车用无刷电机控制器所需要实现的功能一般包括欠压保护、过流保护、调速、刹车、断相保护、软启动等,近年来还有一些实用且流行的功能如定速巡航、ABS 刹车再生制动、1:1 助力等等。
2 软件分析
初始化之后,接着检测电池电压以判断是否低电压,如果低电压,将起动欠压保护。如果电池电压正常,接着接收转把信号以判断操作者设定的速度大小,调整PWM 脉冲的宽度以调整电动机速度。电动机通电后,控制器接收电流检测信号、霍尔转速及相序信号、刹车信号等,判断电动机是否正常运转、电路是否正常工作,动态输出PWM 驱动控制信号,调整车速使之逐渐达到操作者设定的速度。在有异常时采取保护措施直至断开电源。
3 问题和改进
1)问题:单片机接收转速信号和电流检测信号,根据转把速度信号输出PWM 控制信号去调整电机转速和限流,好像能够实现速度的稳定控制。实际上,当转把位置确定后,在上坡时速度会减小而电流会增大,且坡度越陡速度会越慢而电流会越大;当上坡结束转为平路或转为下坡时,往往会出现车速突然地快速增大的现象。我们将这种现象叫做“过冲”。这种情况每次都会在加速了一段之后才来得及调整转把,使得操作者对车速难以把握,而且上坡之后速度快速增大具有一定的危险性。
2)原因分析:上坡时由于阻力的作用,速度难以提升到用户设定的值甚至越来越慢。但在上坡转为水平路面或下坡时,单片机会依然根据转把速度指令来调整PWM 控制信号,力求使车速达到操作者设定的数值,电机驱动电流依然维持在较大的数值上;由于转为水平路面或下坡时阻力突然减小(甚至重力变为动力),车速便会突然的快速增大。
3)改进措施:一是要求用户在上坡时尽可能的使用低速,使用脚踏助力;二是对硬件电路做些改进,在“过冲”时将驱动电流立即降下来;三是对软件进行改进。对于MCU 为核心的控制器,增加对电流增减和速度增减的判断。在“过冲”时不执行转把速度信号指令而改为“定速控制”。
[page]
根据上述思路将软件控制流程进行修改。如图3 所示。将“速度增大而电流不增”作为“过冲”的判断依据。控制器持续检测速度变化和电流变化,再经过判断,如果不属于“过冲”的情况,则执行子程序“调速控制”。这种情况下控制器检测转把电压值来调整PWM,增大或减小电流值使速度变化直至达到操作者通过转把设定的速度值。
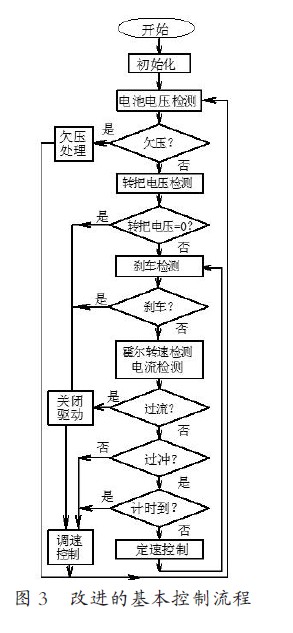
如果属于“过冲”的情况,则执行子程序“定速控制”。在这种情况下,控制器完全根据对速度的检测来调整PWM,力求使车速保持不变。在“过冲”时电流会迅速减小而保持原有的速度不变。在定速控制期间要持续的检测速度和电流,在两种情况下会结束“定速控制”而返回去检测转把电压并调速:一种情况是车子已结束“过冲”,经过判断已退出“过冲”状态;另一种情况是达到了预先设定的“过冲定速控制时间”。这个时间长度为1~3 秒即可。为了保证“过冲”期间的及时刹车,在“定速控制”期要进行刹车检测。
一些其它问题也值得注意。例如:很多电动车的欠压保护有效性不够好。有些控制器在电压低于设定值时就关闭的电源,而当电压升起来超过该设定值时又打开电源,这容易使用户利用蓄电池的回升电压工作,从而造成蓄电池过放电。为了防范这个问题,欠压比较硬件设计成电压滞环自锁比较。欠压保护分为两级,第一级保护时输出欠压报警信号、限制电流的大小。第二级保护是完全关闭电动机驱动和照明。本例中由“欠压处理”子程序完成判断和处理。
再如,很多控制器只有单闭环控制,性能不佳。在路面情况变化大的时候,电流变化很大。这对电机和电池都是不利的。在硬件方面应改用双闭环控制电路,在软件方面应该增加对具体情况的判断。对于双闭环控制系统(无刷:转速/电流双闭环,有刷:电压/电流双闭环)来说,由于电流环存在,可以对电流大小进行限制以及限制电流的变化速度,即可以保护电动车在处于各种正常运行情况下最大电流输出值不会超出设定的电流限幅值, 还可以使电机实现最理想的启动过程和加速过程、以及平稳的电流变化;速度闭环控制则可以限制速度的快速变化(现在的电动自行车不宜追求快速起动性能)。对于单片机控制器来说,可以同时在软件中进行改进。本例中在子程序“调速控制”中设置电流变化速率的限制,不允许电流的快速变化。
为了避免在子程序“调速控制”和“定速控制”之间的频繁切换,在“定速控制”中设置“过冲检测有效时间”。比如0.3 秒,在这个时间内不看做“过冲”而继续运行“定速控制”。
4 结束语
本文对于电动车行驶中“过冲”现象从硬件和软件两方面入手进行了改进。对于硬件的改进,应该使用双闭环控制。对于软件的改进,通过判断是否为“过冲”来选择不同的程序运行。对于“过冲”情况使用“定速控制”,对于非“过冲”情况,使用“调速控制”。关于“过冲恒速控制时间”、“过冲检测有效时间”的合理数值还需进一步研究。

