
【导读】毋庸置疑,传感器获取信号的准确度关系着整个工业自动化系统的测量和控制精度。未获取更为真实准确的现场信号,要对计算机接入模拟传感器输出的模拟量电信号进行不失真的变换。本文提出了针对力和位移的传感器输入标定技术,经验证,此法测量结果准确,且便于操作,具有良好的发展前景。
在工业自动化生产、自动控制系统、非电量电测系统中,广泛使用了种类繁多的传感器,在测量和控制过程中起着重要作用。传感器获取现场物理信号的正确与否,直接关系到整个系统的测量精度。
1 传感器输入通道
本文只针对模拟传感器即输出模拟量电信号进行讨论,并不涉及有关数字传感器。通常,计算机系统一般对传感器的接入如图1所示。

图1 传感器输入通道
这里以力传感器(多为mV级信号)为例,首先,经多路采样开关采样,进入放大器进行直流放大,最后放大的信号被送入ADC(模拟/数字转换器),期间对快速瞬变的信号还须经采样保持处理。ADC将放大后的模拟电压信号转换成数字信号,送入计算机系统的这些数字量信息,虽代表各种物理量参数值的大小,仍须经过标度变换(工程量变换),将它转换成原来参数的真实值,以便进行显示、计算和处理。
要保证计算机系统能获取到现场真实被检测信息,保证系统的准确度,有必要采取不失真的变换方法来获取现场真实信息,对传感器输入通道的各个环节进行统一的标定。
2 输入标定思想
一般情况下,位移输入没有类似力反馈的内部硬件增益。
图2所示是力、位移传感器输入标定模块图。通常位移反馈信号(LVDT或电位计式)的放大计算类似力传感器信号的放大,但是它们同样需要计算增益,并使满量程的最大最小值保持在±10V.
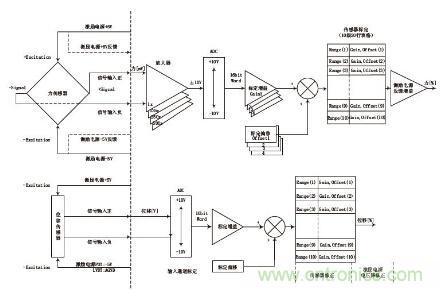
图2 位移传感器输入标定模块图
图3所示是力、位移传感器输入标定比较图。
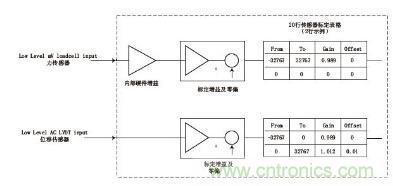
图3 位移传感器输入标定比较图
首先来研究力传感器的输入。与计算机系统连接的力传感器,是一个连接有激励电压的惠斯通电桥,它能够输出以mV为单位的反馈信号[3].这个信号的强弱与激励电压有关,如激励电压采用10 V,要由非常精确的线性电源提供(内部或独立的外置电源),力传感器最终的输出信号与在力传感器上施加的外部力成比例,这个mV级信号即计算机系统测量的力信号。
[page]
其次是确定已选力传感器灵敏度。力传感器灵敏度是由计量部门使用标准测力机检定得出的,并在力传感器检定证书中标明。例如,力传感器灵敏度为1. 979 8 mV/V.
然后是确定硬件增益。为了使ADC获得最佳的分辨率,这个mV级信号需要通过硬件增益来放大,以使信号尽可能逼近满量程的±10 V.用户确定特定力传感器所需要的一挡增益是非常简单的,如表1所列。
对于具有确定灵敏度系数的力传感器来讲,放大后的信号电压范围可采用如下公式进行计算:
放大后的信号电压=激励电压值×力传感器灵敏度×放大系数
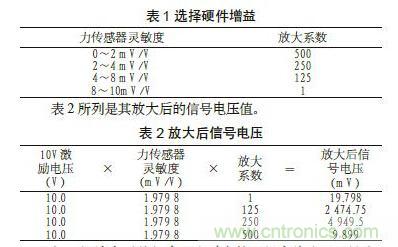
任何超过2 mV/V的信号都将导致总放大后的信号超过10 V和A/D转换器输入的饱和。这将被视为信号截断,从而无法达到全量程测量。可以看到采用放大系数500时最接近10 V,表明没有信号被截断,因此它就是我们需要的最理想的放大系数。下面通过几个方面来进行说明。
2.1 A/D转换器
传感器信号经过调理即放大后,就要被送入到ADC进行转换。由于放大器和ADC本身有微小的误差,通常有必要对数字输出信号进行修正以便获得一个更精确的信号。这通过输入通道标定增益(Calibration Gain)和零偏(CalibrationOffset)来实现。
2.2 力传感器修正
反馈信号随后通过一个以10级20行表格形式构成的软件放大器做进一步的修正。这个表格的目的是用来修正力传感器的非线性,采用多步分段式的方法。通常力传感器的非线性区出现在使用极限状况下(100%量程),因此通常采用一个传感器标定增益和零偏就足够了。
2.3 力传感器标定零偏
对于具有特定灵敏度的力传感器,以下的例子计算结果都少于10 V,这表明没有信号截断。例如:
10×1.934 mV/V×500 = 9.670 V10×2.321 mV/V×250 = 5.800 V然而,±10 V的整个测量范围却没有达到。为了使反馈信号放大到满量程的最大、最小力,就要使用力传感器标定增益(10级表格)。
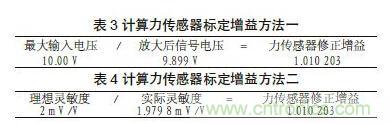
为了快速确定力传感器所需标定增益,一是用对应的理想最大输入电压除以实际放大后信号电压,二是用对应的理想灵敏度除以实际灵敏度,表3和表4所列就是两种计算力传感器标定增益的方法值。

[page]
3 输入标定过程
以力传感器输入通道的标定过程为例予以说明。力的标定过程分为两部分进行。
3.1 输入通道增益和零偏的标定
如采用一个独立的精确电源作为输入,返回信号需要通过一个1 MΩ的电阻连接到模拟地。避免由信调器电路的输入电流的偏差而带来的输入电压的不稳定。同样,也需要测量激励电压在电缆末端的电压值,并把它考虑进来。所以,强烈建议用户采用标定盒来进行标定。
确定已连力传感器的灵敏度,例如,力传感器灵敏度为1.979 8 mV/V.
确定反馈信号量程范围是从-10 ~ +10 V.为了能够充分利用整个量程,最理想的办法是采用放大系数,这个放大因子可以把反馈信号放大到±10 V范围内。通过两个步骤来实现,一是采用硬件增益,另一是输入通道标定增益。
现以硬件增益为例,选择能够把反馈信号放大到小于或等于10 V的放大系数。可以看到采用放大系数500倍时最接近10 V,因此它就是我们需要的最理想的放大系数。必须确保最终电压不超过极限(-10 ~ +10 V)。若超过了极限,可能出现无法预测的后果。
在确定了硬件增益后,再把一个mV级高精度电源或一个标定盒或参考力传感器连接到计算机系统的传感器输入通道上。
由于放大器和ADC不是完全理想的,自身存在很小的误差,达到的增益不可能确切就是所选择的硬件增益。为了确保最终信号不会高于+10 V或低于-10 V,建议标定工作在满量程的50%范围内进行。
例如,与所选硬件增益500对应的理想灵敏度为:
10 V反馈电压/(10 V激励电压×500)= 2 mV/V
需要注意的是,激励电压以+5 V、-5 V形式给出,而要以一个mV级高精度电源来仿真模拟力传感器输出信号,一般可选择+10mV和-10mV作为输出来模拟50%的载荷。这样:
5 V激励电压(50%的10 V激励电压)×2 mV/V = 10 mV因此有:
10 mV×500 = 5 000 mV反馈电压(50%的10 V反馈电压)为力传感器输入通道施加代表50%量程的模拟信号输入(10 mV),同时将力反馈拖入到软件的图形取样窗口中,可以看到显示的平均值接近50%.为了把这个值调整到准确的50%,就需要对输入通道进行标定。选择菜单中的“Calibrate”
按钮,就可以打开如图4所示的窗口。

图4 输入通道标定增益和零偏
对话框中的“Current Values”方框中显示来自输入反馈的mV电源、标定盒或参考力传感器的当前电压百分数值。“Unscaled value”应该显示一个接近-50%的读数。点击“Copy”,把这“Unscaled value”复制到“Unscaled value”列的第一行。随后,在“Scaled value”列的第一行中输入我们的期望值(-50%)。
转换mV级电源或力传感器的极性。“Unscaled value”
应该显示一个接近+50%的读数。把这个值复制到“Unscaledvalue”列的第二行,并在“Scaled value”列的第二行输入+50%的值。
现在,按下“Calculate(计算)”按钮,软件开始计算该传感器输入通道标定增益和零偏以达到期望的Scaled值。按下“Apply(应用)”按钮,这些值将被保存到计算机软件系统中。
3.2 力传感器的增益和零偏标定
这个问题实际上就是力传感器标定的设定,即参数表格中的增益和零偏。
上述输入通道标定增益和零偏,都是以理想力传感器灵敏度进行的,而最终实际的力传感器灵敏度并不等同于理想力传感器灵敏度,因此为了得到真实的力反馈信息,就需要对上述输入通道的标定增益和零偏进行修正。方法如下:
(1)对实际力传感器的灵敏度进行补偿。修正系数利用公式计算:
修正系数=理想灵敏度(mV/V)/实际灵敏度(mV/V)示例:LC灵敏度修正系数= 2 / 1.979 8 = 1.010 2.
(2)系统的最终增益。利用公式计算:
系统的最终增益=输入通道标定增益×LC灵敏度修正系数示例:系统最终增益= 1.004 37×1.010 2 = 1.014 61.
(3)将真实力传感器连接到传感器输入通道后,用手拉或压一下力传感器来检查增益的符号。如果不正确的话,给系统增益改变一下正负号。
(4)由于力传感器自身的静态零偏或施加在力传感器上的质量,可以看到一个小的零点偏移。在软件图形窗口中看到的偏移值,从系统零偏(System offset)中加上或减去(如果需要的话)这个值。
(5)保存力传感器的LC灵敏度修正系数、系统最终增益和系统零偏(Save the configuration)到软件系统中。
至此,就完成了实际力传感器的输入标定。
结语
本传感器(力、位移)输入标定实现方法,首先按实际要接入的传感器相对应的理想传感器对输入通道(硬件)进行标定,得到理想传感器输入通道标定增益和零偏;最后对实际要接入的传感器(软件)进行补偿,得到系统最终增益及系统零偏。
这一方法可方便、精确地实现计算机系统传感器输入标定。譬如,一个力传感器需要经常在计量部门标定,只需根据新标定的实际灵敏度,重新计算出LC灵敏度修正系数、系统最终增益及得到系统零偏,即可完成对该对力传感器的输入标定。这一方法已经在计算机测控系统得到应用,效果良好,值得推广和借鉴。
相关阅读:
拆解狂魔:一拆便知太阳能温度传感器
【安全系统应用篇】只需五步,轻松设计出电容式触摸传感器
【布局设计及应用实例篇】只需五步,轻松设计出电容式触摸传感器

