
【导读】传感元件可将相关物理量转换为电信号。传感元件的常见输出特征是非线性,即传感元件的输出不随相关物理量的变化而发生线性变化。这种非线性会导致测量不准确,存在误差。本文主要介绍纠正线性可变差分变压器 (LVDT) 定位传感器中非线性问题的方法,适用于汽车液压阀定位传感等众多应用。此外,本文探讨的内容还适合超声波停车辅助等其它类型的汽车传感器应用。
支持高频率输出的传感器
许多传感元件产生的电信号都是相对的高频率信号。这既是因为传感元件的激励信号是高频率信号,也因为被测量的物理量在性质上属于高频率。典型的例子就是使用 LVDT 定位传感器对汽车液压阀进行定位测量。该传感器属于高频率性质的原因是 LVDT 初级线圈是通过5KHz 等高频信号激励的。同样,超声波停车辅助应用使用的压电变送器输出也属于高频率,因为变送器测量的是超声波强度,其信号频率大于 20KHz。
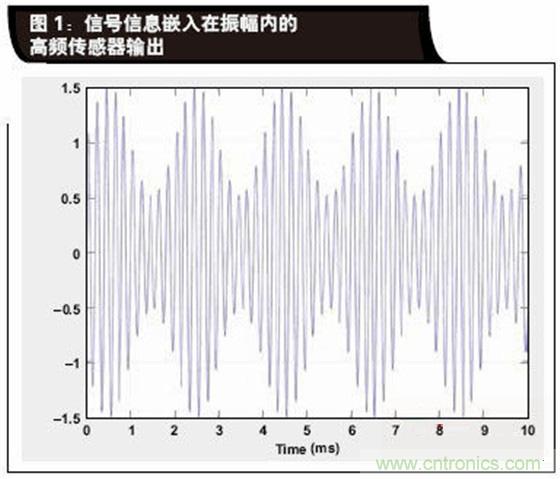
在传感器输出高频率信号的情况下,信号信息通常大多嵌入在信号的振幅中。图 1 是高频率传感器信号的时间曲线图,而且振幅代表传感器测量的物理量变化。该信号的数学表达式为:
其中 AC 是传感器的激励振幅,ωC 是以弧度/秒为单位的传感器激励频率,AS 是需测量物理量的振幅,而ωS 则是以弧度/秒为单位的需测量物理量的频率。
假定有用信号的振幅小于高频率载波信号的振幅,则 y(t) 就是无失真的调幅信号。
注意,在某些情况下,信号信息也能嵌入在信号的频率中。例如,如果正在移动的汽车需要使用保险杠或后视镜中的超声波变送器测量与另一辆移动车辆的距离,那么信号的频率将根据多普勒效应提供相关车辆相对速度的信息。
本文讨论的重点是如何从高频率传感器的输出提取振幅信息。提取振幅信息的技术也称为振幅解调。
自上个世纪初 AM 无线电广播传输的兴起,振幅解调技术就一直存在。无论在模拟域还是数字域,都存在可从信号中提取振幅信息的众多解决方案。此外,解调进程不仅能提取信号的振幅,同时也能提取传感器输出信号相对于传感器激励的相位信息。前一种解调技术被称为异步解调,而后一种技术则被称为同步解调。
根据上述定义,本文的侧重点将限定在一个特定的振幅-提取技术类别,即数字异步振幅解调。
为什么这一小类技术至关重要呢?随着德州仪器 (TI) LBC8LV 工艺等混合信号集成电路(IC) 高级制造技术的问世,我们可使用混合信号信号处理器为各种类型的-传感器提供支持。采用此类传感器时,信号调节一部分在模拟域中进行,一部分在数字域中进行。虽然信号调节架构已具有量化功能,但如果设计得当,这类器件能够带来灵活性,为大多数传感器应用提供足够的准确度。应用工程师能够轻松为其特定应用方案定制信号调节器,从而可加速其产品开发进程。
TI 推出的 PGA450-Q1 就是混合信号信号调节器的典型范例,可用于超声波停车辅助应用中采用的汽车传感器。具体而言,该信号调节器先使用放大器将电信号放大,然后再使用数字异步振幅解调技术提取信号振幅。
数字异步振幅解调技术
探讨数字异步振幅解调技术的两种方法:峰值法和均值法。
峰值法
在本异步解调方法中,可提取每个频率周期的传感器输出信号峰值,也就是说,该过程将在底层载波信号的频率下使信号及时离散。
如果我们已经知道了底层信号的频率(通常都是这样的),而且如果信号呈正弦波(这是典型的高频率激励信号),则提取的峰值就是每个周期中正弦波的振幅。也就是说,第 n 个载波频率周期的峰值可以表达为下列数学式:
PGA450-Q1 可实施峰值解调法。
均值法
采用异步解调法时,可首先对传感器信号进行整流。整流输出随后使用低通滤波器进行滤波。等式 1 中描述的信号全波整流输出用数学式表达为:

其中 u(t) 是振幅等于 1、频率等于ωC 的方波。

因此,整流后的输出可以表达为:
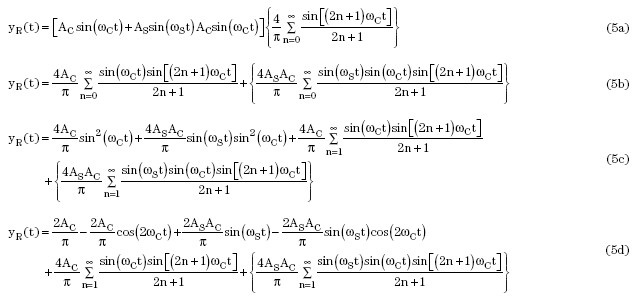
然后使用增益为 0dB、截止频率为ωC 的低通滤波器对整流输出进行滤波,滤波后的输出可表示为:

公式 6 表示可使用这种方法提取信号。
非线性影响
在线性系统中,系统的输出与输入成比例,换言之,输出为:
其中 x 代表系统输入,y 代表系统输出,而 ai 则代表系数。为简化分析,可将偏移项(即与输入信号无关的项)忽略不计。
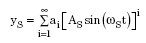
在非线性系统中,系统的输出含有高次输入项,即输出为:

具体就 LVDT 信号调节而言,等式 1 中给出的振幅调制信号可能会受非线性的影响。导致非线性的可能原因包括:
1、驱动信号失真,或载波具有较高阶谐波。载波含有高阶谐波的原因是载波信号本身是非线性系统的输出:
2、非线性信号链,或信号输出相对于其输入呈非线性:
3、非线性变送器,或变送器的输出相对于其测量的物理量呈非线性:
注意,头两个非线性来源是性能不理想的信号生成器/调节器导致的结果,而第三种非线性来源则是变送器造成的。
此外,上述所有非线性情况在系统中可能同时存在,从而会使信号链的输出用数学式表达异常复杂。
解决非线性问题
现在,我们不仅将解决由非理想信号生成器和调节器带来的两种非线性来源问题,而且还将分析常见非线性系统形式之一的二阶非线性系统。该分析可进一步延伸至更高阶的非线性以及非线性变送器输出。
失真驱动信号
在存在失真驱动信号(或载波信号)的情况下,通过三角函数运算并设a1=1,a2=b,等式1 给出的振幅调制载波信号可表示为:
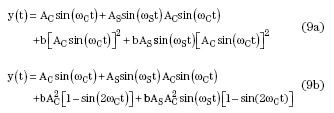
等式 9 说明,除了大约为ωC 的信号外,变送器输出还提供 0 弧度/秒和大约 2ωC 的频率组分。
最大限度减少频率组分(在 0 弧度/秒和大约 2ωC 下)的明确方法是使用中心频率设定在ωC、而且带宽足够的带通滤波器。具体而言,带宽应具有在 wC±wS 范围内无显着衰减的特性。这样的带通滤波器,其输出可表达为:

然后,无论采用峰值法还是均值法,都能通过解调该带通滤波器输出来提取变送器信号。
非线性信号链
二阶信号链非线性的存在会导致振幅调制信号发生下列变化:
设 a1=1、a2=b,经过下列三角函数运算,可将等式 11 表示为:
等式 12 再次说明,除了大约为ωC 的信号外,变送器输出还提供 0 弧度/秒和大约 2ωC 及各种更高频率的频率组分。
再次使用中心频率设定在ωC、具有足够带宽的带通滤波器,可以减少非线性引起的频率组分。使用这样的带通滤波器,带通滤波器的输出可表达为:

然后,无论采用峰值法还是均值法,都能通过解调该带通滤波器输出来提取变送器信号。
结论
LVDT 定位传感器的输出可能会呈非线性。本文介绍的在信号链中使用带通滤波器的方法可能是一种有效解决信号非线性问题的方法。
图 2 是本文所述 LVDT 信号调节器的简化方框图。具体来说,该方框图说明了如何在信号链中使用带通滤波器。
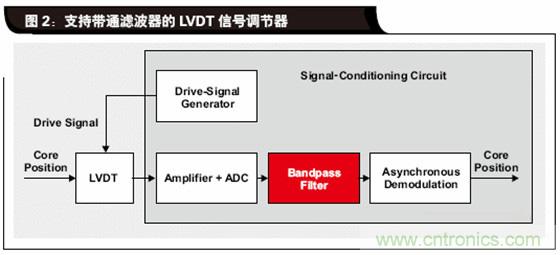
注意,TI PGA450-Q1 信号调节器专为汽车超声波停车辅助传感器精心设计,已包含带通滤波器。
推荐阅读:

