

【导读】CES 2026上,英伟达发布多款汽车领域核心产品与技术,其中开源辅助驾驶模型Alpamayo颇具看点,该模型拥有100亿参数,命名寓意技术高地,也呼应了黄仁勋提出的训练、推理、仿真“三台计算机”技术金字塔概念。英伟达还提出,计算机产业每10-15年将迎来一次平台变革,新一代DRIVE Thor芯片等产品正是其顺应这一趋势的布局。尽管汽车业务营收占比不高,但英伟达已持续投入超8年,且正深度贴合中国客户需求,提供适配行业发展的技术与产品支持。
为汽车行业提供全栈解决方案
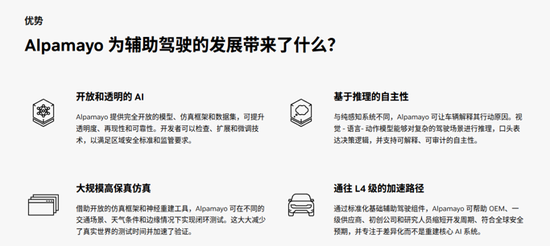
一个优秀的智能驾驶产品,究竟该具备什么样的核心特性?在英伟达看来,共有四大特点:第一是性能,既依赖SoC的算力基础,也离不开算法层面的深度优化;第二是系统稳定性,随着国内智能驾驶量产规模扩大,系统的可靠性与安全性成为核心竞争力;第三是易用性,降低开发者的上手门槛,实现车端与云端 AI 芯片的高效开发,是行业的共同诉求;第四是高效支持,快速响应客户需求,为项目落地提供全周期技术服务,是客户最为关注的要点。
黄仁勋反复强调的英伟达核心支柱是三台计算机:用于训练的DGX、用于仿真的OVX和用于车载推理的AGX。这构成了从数据训练、仿真验证到量产部署的完整闭环。而英伟达的解决方案也可以分为三个层面:SoC芯片、平台和软件。
第一,SoC芯片方面,英伟达的车载计算芯片经历了四代发展:2018年的1TOPS的Parker,到2020年量产于小鹏P7等车型的30TOPS的Xavier,再到2022年254 TOPS的Orin,以及可以达到最高2000TOPS(NVFP4)的Thor。
衡量芯片性能不能只看算力数值,内存带宽同样是关键指标。芯片性能如同木桶效应,GPU、CPU与内存带宽任一环节成为短板,都会制约整体性能发挥。以Thor为例,其内存带宽高达273GB/s,处于行业领先水平。采用NVFP4和投机采样,对内存带宽的需求还可以进一步减少,从而使性能有更好的发挥。此外,英伟达在芯片设计中融入了诸多创新架构,除了核心的GPU计算单元,还集成了多种专用加速引擎,确保计算资源的高效利用。在专利布局上,针对车载GPU,英伟达拥有700余项专利技术。
第二,平台方面,英伟达严格遵循ASPICE和ISO 26262流程,同时获得了产品级的TÜV的ASIL-D功能安全认证。值得注意的是,行业内部分厂商宣称的 “安全认证”,需区分是产品认证、架构认证还是流程认证,其中产品功能安全认证的标准最为严苛,而英伟达是业内少数完成全流程认证的企业。
英伟达还定义了像Hyperion这样的参考架构,当前 Hyperion 已发展至第四代,也就是Hyperion 10。该平台在设计之初,就对传感器配置、系统架构与软件进行了功能安全分解,明确了支持L4 级自动驾驶所需的算力配置,Hyperion 10搭载两块基于 NVIDIA Blackwell 架构的 NVIDIA DRIVE AGX Thor 系统级芯片,可提供超过 2000 TFLOPS FP4 精度 (或 1000 TOPS INT8) 的实时算力。同时,英伟达为每一个软硬件模块都设定了明确的功能安全目标,形成了完整的安全需求矩阵。
第三,软件方面,英伟达提供两种可量产的OS选项:QNX和基于Linux的DriveOS。在中国市场,许多企业倾向于Linux,主要因其生态和开发便利性。为此,英伟达将DriveOS QNX中许多客户重视的功能,如内存ECC校验、诊断功能迁移到了Linux版本中,从而在保持开发灵活性的同时,增强了系统的可靠性和诊断能力,更大幅缩减了从芯片到量产的时间。
除此之外,在刚刚过去的CES上,英伟达发布的Alpamayo大模型,这是一款融合推理能力的开源VLA大模型,基于Transformer架构打造。英伟达认为,单纯的端到端模型缺乏可解释性,而融入推理能力的Alpamayo模型,能够让智能驾驶决策更具逻辑性与可靠性。
针对中国市场的创新
中国团队紧密配合本地市场的快速需求,英伟达驱动了许多创新产品。
首先,第一个例子是卫星架构下的雷达数据处理优化。传统毫米波雷达的数据处理由雷达模组内置芯片完成,仅向车载SoC传输目标检测结果。随着车载SoC算力的提升,车企提出 “将雷达原始数据传输至SoC进行处理” 的需求,这一方案可节省雷达模组的硬件成本,并提升算法的灵活性。针对这一需求,英伟达对NvSIPL SDK进行了定制化开发,可支持雷达和激光雷达。同时,把新增雷达原始数据处理模块部署到SoC的专用加速器(PVA)上,既避免了占用GPU资源,又实现了算力的高效利用。
接着,第二个例子是TensorRT Edge-LLM 的车端适配。2023年英伟达发布了面向云端大模型推理的TensorRT LLM SDK,一些车企随即提出将其移植到车端平台的需求。2024 年,英伟达中国团队仅用两周时间,就完成了TensorRT LLM在Orin平台的初步适配。但在后续优化中发现,云端与车端的技术需求存在显著差异:云端关注高吞吐量,而车端受限于传感器数据输入规模,对低延迟、低内存占用要求更高。
为此,团队推出专为车端设计的TensorRT Edge-LLM SDK,并与国内大模型团队展开合作,完成模型适配与优化。目前,该SDK已支持英伟达全系列嵌入式计算平台,包括车端的Orin与Thor系列、嵌入式的Jetson 系列,以及和联发科合作开发的C-X1/ C-Y1系列。相较于业内其他推理框架,TensorRT Edge-LLM具备三大优势:一是支持C++原生开发,更符合车载场景的量产需求;二是深度适配英伟达GPU架构,可充分发挥硬件算力;三是性能优势显著,官方数据显示,其推理效率相较于业界其他大模型推理框架提升两倍以上。目前,英伟达正在推动该 SDK的功能安全认证。
最后,第三个例子是Orin芯片的性能迭代。Orin芯片作为一款发布三年半的产品,通过TensorRT的版本迭代,Transformer的性能可以提升30-50%;同时基于最新的TensorRT Edge -LLM SDK,Orin同时可以很好的支持7B的大模型,并取得相当好的性能。
从底层的芯片硬件,到中间层的DriveOS与SDK工具链,再到上层的感知、规控算法与 Alpamayo大模型,英伟达已构建起全栈式的智能驾驶解决方案。
长期践行开源模型和工具链技术路线
云端协同也是英伟达的一个发力点。在数据中心端,英伟达主要包括两个开源模型平台:一是世界基础模型(WFM)Cosmos,二是CES上刚刚发布的Alpamayo。
开源模型与工具链并非英伟达的战略转型,而是长期践行的技术路线,核心目标是通过技术普惠,推动行业发展。
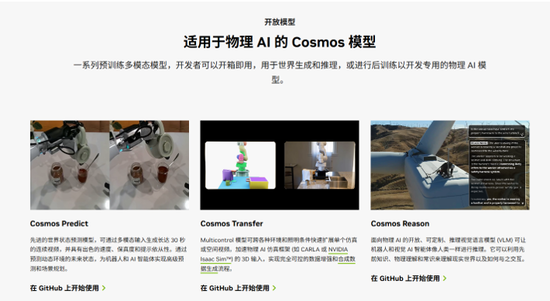
首先,在Cosmos方面,系统核心构成包括三方面:一是模型层,涵盖感知、决策、推理等全链路模型;二是工具层,包括数据标注、数据清洗、模型训练等开源工具;三是数据层,提供丰富的训练数据集。其中,工具层的两款工具深受国内企业青睐:一款是用于训练过程的自动化数据标注工具,可大幅提升标注效率;另一款是数据检索工具,能够快速定位高质量的训练数据。针对中国市场,英伟达将原本的英文训练脚本,优化为支持中文的开源版本,进一步降低了开发门槛。
当前智能驾驶行业面临着一个核心瓶颈:随着自动驾驶等级的提升,长尾场景数据采集成本呈指数级增长,传统“路采-训练-验证”模式已难以为继。这也是近半年来,国内自动驾驶技术突破放缓的重要原因。为此,英伟达提出了生成式AI驱动的解决方案,通过Cosmos、Issac等生成式模型,合成高质量的长尾场景数据,以算力换取数据,破解行业痛点。
生成式模型分为三大类:一是纯生成模型,输入一段真实路况视频,即可预测后续的场景变化,部分车企已将其应用于仿真测试;二是条件生成模型,通过输入文本指令,生成特定场景的数据,可精准覆盖极端天气、复杂路况等长尾场景;三是风格迁移模型,能够将2D 仿真场景转化为逼真的3D数据,提升仿真测试的真实性。区别于行业内其他方案,英伟达的生成式模型核心优势在于工程化量产能力,模型生成的数据具备时序一致性与场景合理性,完全满足自动驾驶的训练与测试需求。
其次,在Alpamayo方面,该模型的核心创新在于因果推理数据集的构建,英伟达首次提出了参考公式化的数据集标注方法,通过“感知-推理-决策”的全链路标注,让模型能够学习到决策的逻辑,而非简单的图像与结果的映射关系。
以施工路面场景为例,传统感知模型仅能识别 “施工路面”这一目标,而Alpamayo模型则会进行多步推理:首先识别 “视线遮挡” 这一关键特征,再结合车辆当前的速度、距离等信息,最终输出“减速慢行”的决策指令。这种推理式的决策逻辑,让模型具备更强的泛化能力,即便遇到从未训练过的施工场景,依然能够做出正确决策。“数据集构建、模型训练、仿真强化”的全链路方案,是Alpamayo模型实现高泛化性的核心原因。
此外,英伟达已开放了原始数据集,该数据集涵盖全球多地区的真实路况,且已完成脱敏处理,开发者可直接用于模型训练。

Alpamayo模型的最大价值,在于为L4级自动驾驶提供了一条高效的实现路径。其可解释性的决策逻辑,解决了传统端到端模型黑箱的行业痛点,目前已有多家车企计划将该模型作为主驾系统的核心算法,搭配冗余的安全系统,实现L4级自动驾驶的量产落地。
开源模型源于与中国客户的合作
许多开源工作是源于英伟达与企业深度合作中识别到的痛点。有三个典型案例,展现了英伟达创新技术如何赋能智能汽车的量产落地。
第一个案例是蔚来自动驾驶数据处理加速方案。2022年,蔚来在量产车型的数据回传过程中,面临着数据量激增、处理效率低下的难题。英伟达团队针对这一痛点,开发了一套自动化的数据筛选与预处理方案,最终实现数据处理吞吐量提升6倍。这一方案看似与芯片销售无直接关联,但英伟达始终秉持“解决行业痛点”的理念,通过技术赋能降低车企的研发成本,才能推动整个行业的发展,这也是英伟达区别于其他芯片厂商的核心竞争力。目前,该方案已进入开源流程,未来将面向全行业开放。
第二个案例是英伟达闭环仿真平台NuRec的本土化落地。国内头部车企的仿真测试体系中,均能看到该平台的身影。该平台的核心功能是,输入一段路采数据,即可生成多样化的场景变体,例如调整车辆位置、行人行为、天气状况等,帮助车企快速完成海量场景的测试验证。某车企的实践数据显示,应用该平台后,仿真测试效率最高可提升35倍,测试成本最多可降低到50分之一,辅助驾驶系统的研发周期从“月级” 缩短至“小时级”。
第三个案例是端到端训练的存储优化方案。随着端到端模型的兴起,车企的训练数据从“单帧图片”转向“连续视频流”,存储成本激增300%~1000%,成为制约技术落地的新瓶颈。英伟达团队针对这一问题,开发了边解码边训练的流式处理方案,无需将视频数据完整存储,即可直接用于模型训练。该方案仅增加数百分比的GPU开销,却能帮助车企节省90%的热存储成本,按单车企的训练规模计算,每年可节省上亿元的硬件投入。目前,该方案已在多家车企落地,并将持续迭代优化。
这三个案例的共性在于,英伟达解决的都是车企量产过程中 “真问题”。这些问题看似与芯片算力无关,却直接决定了技术能否从实验室走向市场。
总结
从芯片硬件的性能迭代到软件生态的定制优化,从开源模型的技术普惠到量产场景的痛点破解,英伟达以全栈布局和长期主义,构建起智能驾驶领域的核心竞争力。Alpamayo模型的因果推理创新、生成式AI的数据解决方案,以及针对中国市场的本土化适配,不仅彰显了技术硬实力,更体现了与行业共生的发展理念。随着开源生态的持续完善和全栈方案的不断迭代,英伟达有望进一步打破智能驾驶量产瓶颈。


