

【导读】速度更快、性能更好的机器视觉是迈向下一代工业自动化、无人驾驶汽车和智能城市管理的支撑技术。更好的图像质量、更快速的图像捕获以及更低的设备成本和复杂性是自动化设备、检测系统和机器人等领域设计人员的主要目标,其最终目的是加强质量保证并提高生产率。
同样,先进的机器视觉能够识别标牌、道路标记和前方的潜在危险,因此对自动驾驶车辆至关重要。在这项应用里,重点是缩短系统响应时间,提高图像识别准确度。就智能城市应用而言,提高城市中心闭路电视图像清晰度,有助于执法机构通过预测骚乱和提高识别能力来保护公民。
此外,高性能机器视觉的新兴市场机会也开始出现,其中包括用于协助车辆引导和数据收集的无人机载机器视觉,可用于勘察农田或建筑工地等应用。
要在较短时间内从捕获的图像中提取更多信息,需要更好的图像质量和更强的信号处理性能。为此,一些重要的创新正在陆续出现,它们适用于摄像头和图像传感器,而且由于机器学习技术的商业化,图像处理技术也在得到广泛应用。
下一代镜头增强聚焦和视觉性能
在整个系统的前端,摄像头镜头一直是某些大的创新工程的主题,通过采用单摄像头或单组镜头可执行多个任务,能够提高系统灵活性、缩短工作周期时间,并简化设备系统设计。
其中,液体镜头(如图1所示)是一种新兴的光学器件,它扩展了传统镜头的景深,而无需传统电动对焦系统的高成本和复杂性。电动对焦也相对较慢,因此避免这些将有助于增加应用中的工作循环时间,例如涉及不同距离物体的工业检测等应用。
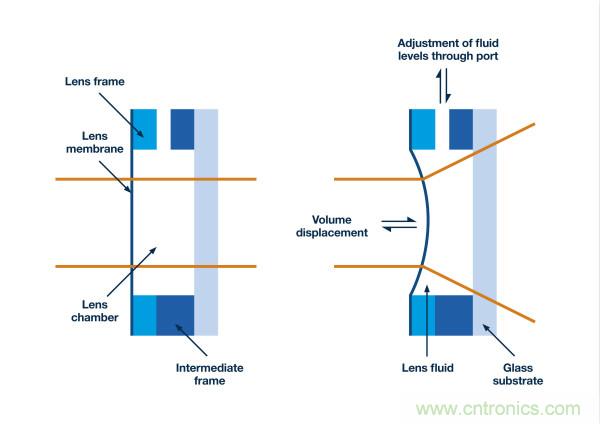
图1:液体镜头只需几μm的形状变化,即可实现焦距调整。
引入液体镜头能够使工作中的标准光学系统在几个ms内调整对焦 - 从无穷大到小于100mm,具体取决于间距要求。液体镜头由一种密封在柔性膜内的光学液体构成。通过移动膜或调整光学液体的体积,将镜头半径改变仅仅几个μm,其效果相当于使用传统电动对焦系统将镜头移动几个cm。除了更快的对焦和更简单的构造(移动部件更少,因此操作故障的可能性也更小),液体镜头系统还受益于较低的惯性和更低的功耗。
同样, 360 度图像采集能够使机器视觉系统在固定位置通过单个摄像头即可捕获目标的详细信息,这样可以避免多摄像头检测系统以及相关图像处理和存储子系统的高成本和复杂性,多个存储子系统也会导致系统性能限制。如果部采用360 度图像采集,可能需要一种机制来多次调整位置或旋转摄像头,或需要旋转要检查的物体,这种方式在食品包装检查或空中测量时比较常见,同样会增加系统的总体成本和复杂性。
对于需要进行从各个角度进行目标检测的系统(例如包装厂中粘贴到瓶子上的标签),可以使用位于物体自身正上方的超中心(hyper-centric)或近中心(peri-centric)镜头来实现360度视觉功能。超中心镜头能够捕获光线,就好似它们是从位于镜头前面一定距离某个点发出的一样。光线汇聚点和镜头的周边形成了视锥(viewing cone)。将物体放置在此视锥内,直接位于向下镜头的下方,可以使来自物体顶面和垂直侧面的光线同时进入镜头。将光线聚焦在传感器上可以在单帧中捕获整个影像。利用该原理,摄像头可以捕获一个孔内或腔内的360度视图,但无需在其中插入任何光学探头。其他技术也可通过单帧捕获物体多个影像,它是将超中心镜头与一组镜面阵列整合,从而能够有效地同时看到物体的每一面。
传感器:物理原理与构造
提高CMOS图像传感器的分辨率是捕获更精细图像的关键,然而由于降低了信噪比(SNR),如果只减小像素尺寸可能导致较差的图像质量。要获得更高分辨率,就需要在技术上进行改进,以便在不影响传感器性能前提下减小像素尺寸。这些可通过多个方方面面实现,其中一种是优化像素间距和感光面积与总面积之比(也称为像素填充因子)。在像素的物理层面进行更多根本性改变可以改善诸如增益、效率和动态范围等参数。传感器制造商还改进了从像素读取数据的技术,从而实现更高的信噪比、帧速率和线性度等更高的性能。
在过去十年左右时间里,驱动传感器性能改进的最重要技术之一是使用背照式(BSI)技术,它是通过上表面和下表面吸收光线,实现了像素小型化,而不会降低关键性能参数(如阱容量、量子效率、暗电流等)。这种技术的后续进展是对传感器和图像处理芯片的三维(3D)堆叠,能够实现更小外形尺寸。随后,包括氧化硅和金属焊盘的3D混合堆叠消除了硅通孔(TSV),从而更有利于两个芯片之间实现有效且直接的连接。最近,业界又开发出顺序整合,可以制造单片式图像传感器,其中每个图像传感器都集成有光电晶体阵列、3D可堆叠像素读出逻辑和存储器等,并通过集成式高密度I/O连接。
全局快门增强移动物体成像效果
在高速工业自动化以及汽车和无人机等应用中,需要捕获快速运动物体的清晰图像。这对于传统卷帘式(rolling-shutter)图像传感器性能构成巨大挑战,主要原因是传统卷帘式图像传感器每一次将从传感器像素读取仅仅一列数据,并发送到帧缓冲器。如果物体正在运动,则从读取一列图像到读取下一列之间的时间位置变化可能会导致失真,出现图像模糊或弯曲等问题。
当拍摄快速运动物体或将摄像头安装在运动车辆上时,全局快门(Global shuttering)可提高图像清晰度。这项技术首先在高端静态摄像头中得到应用,现在已经扩展到工业和汽车视觉系统以提供更高性能。在全局快门中,将所有像素电荷值同时储存到一个小的像素内存储器中,然后像以前一样逐行依次读取到帧缓冲器。这样可以得到更清晰图像,但没有卷帘式快门的失真。
通常像素内存储器会占用一定空间,从而显着地减少用于光子吸收的像素面积。目前业界已经克服了一些技术挑战以便能够创建具备更高SNR和更高动态范围的全局快门图像传感器,但不会增加像素尺寸,这样可以弥补像素内存储器占用空间。此类图像传感器的一个例证是1Mpixel、1/4英寸格式的安森美半导体的 ARO144。

图2:来自安森半导体的ARO144图像传感器。
全局快门像素具有高量子效率,可确保快速充电,同时又对与图像无关的充电(如由电子扩散引起的串扰)不敏感。另外,其光学屏蔽非常靠近传感器,可以排除像素表面杂散光影响。
图像处理中的人工智能技术
在信号处理链路中,机器学习(利用深度神经网路)可用于摄像头光学组件和传感器之后,其商业化应用使构建图像和随后从中提取信息的方式发生根本性变革。这里有一个例证,从中可以看到采用人工智能技术使低光照性能得到显着改善,从而可以在近暗(near-dark)条件下拍摄高品质图像。
在低光照条件下,捕获的原始数据对于传统信号处理链路构成很大挑战。以电子方式提高传感器感亮度(ISO值)会在图像上增添明显噪声,从而导致图像品质变差,对图像进行降噪处理效果也很有限。其他改进图像品质的技术包括延长曝光时间,而这些在工业应用或车载摄像头中通常不切实际。
最近,业界开发了一种非常巧妙的技术,它利用机器学习来极大地减小基于原始弱光数据构建图像中的可检测噪声。使用包含原始短曝光时间、低光照图像和相应的长曝光时间参考图像的系列数据可以训练深度神经网路。在对网路进行充分培训后,可以通过直接处理原始短时间曝光数据来创建高品质图像。这项技术已在市场中顶级智能手机中得到应用,可以提供更美观图片。它还可适用于工业和安全等领域,例如可用于生产线检查或监控系统,能够捕获更好图像。
结论
从系统前端的摄像头镜头到系统后面的图像感测和图像处理设备,整个现代图像处理系统中有许多技术改进正在开发。所有这些技术的合力效果预期将推动工业视觉系统应用范围的不断扩展,并进一步提高系统性能基准。
推荐阅读:

