

【导读】在一些场所经常会看到一种平衡电动车的代步工具,被称为最后一公里神器。其实它的工作原理非常简单,建立在动态稳定原理上,同样也是车辆自动平衡能力。下面就详细介绍自平衡电动车的的工作原理及详细设计流程。
文中分析了测量角度和角速度传感器的选择,通过Atmega16单片机多路信号AD采集陀螺仪和加速度计的信号,经过Kalman滤波算法计算动态的角度和角速度,通过LCD1602显示角速度和角度的值、转向值。利用PID控制算法控制自平衡车的平衡状态,使车体在平衡位置稳定。利用大功率MOS管设计驱动电路,通过单片机有效地控制电机的转速、电机的转向,从而有效地控制自平衡车的前进、后退及转弯功能。
系统总体设计方案
两轮自平衡自动车采用AVR Atmega16芯片作为主控制芯片,选择外部16 MHz晶振,使用JTAG仿真器进行实时仿真与调试;采用LCD1602显示转弯角度传感器测量的动态角度和角速度,为了让调试的过程中更加直观。动态角度和角速度的测量通过陀螺仪测量角速度,三轴加速度计测量角度。由于平衡车是运动的,所以三轴加速度计测量的角度里面参杂动态角度,最终通过卡尔曼硬件融合电路精确地测量出动态的角度和角速度。
转向模块采用高精度电位器,当手把向右偏转时,两轮车向右转,当手把向左偏转时两轮自平衡车向左转弯,可以实现原地转弯。电机采用直流减速电机,主要是因为直流减速电机能耗低、性能优越、减速机效率高达95%以上,而且振动小、噪音低、节能高、选用优质段钢材料,钢性铸铁箱体,齿轮表面经过高频热处理。节省空间,可靠耐用,承受过载能力高,经过精密加工,确保定位精度,扭矩大。电机驱动模块采用大功率MOS管,由于电机的功率大,需要的电流大。电机的转动通过PID控制算法,实现两轮车的自平衡状态。系统简易硬件结构框图如图1所示。
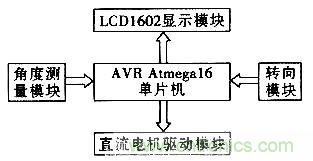
图1 系统简易硬件结构框图
车模直立控制方案
两轮白平衡车的直立是通过负反馈来实现的,但是两轮自平衡车的直立相对木棒的直立是相对简单的,木棒的直立是二维的而自平衡车有两个轮子着地且直立是一维的。所以通过控制轮子的转动,抵消倾斜的趋势便可以很好地保持车体直立。两轮自平衡车模型如图2所示。
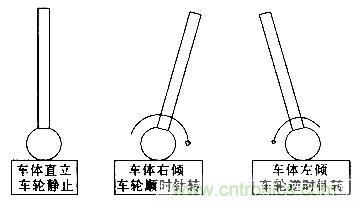
图2 两轮自平衡车模型图
两轮自平衡车之所以在不加外力的情况下不能够直立,是因为车体的偏转方向和受力方向是在同一方向,所以车体会加速倒下,如果要车体直立不倒下那就需要添加外力作用才能够保持平衡状态,这个外力就是车轮对地的摩擦力。由于电机在转动时给地面一个摩擦力,根据牛顿第三定律,地面给车体一个与相对运动方向相反的作用力,这样才会不至于让车体加速倒下。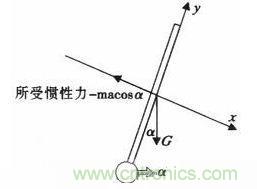
图3 受力分析图
两轮自平衡车的受力分析: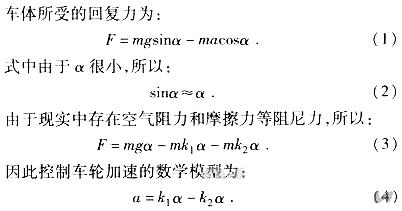
车模行走控制方案
两轮自平衡车的速度是通过车轮的速度实现的。车轮的速度通过直流电机经过减速箱,增大扭矩。利用直流电机驱动器控制电机的正反转和PWM调速系统控制两轮自平衡车的平稳运行。然后通过电机的加速度控制车体的平衡,通过电机的恒定速度和静止状态控制车体的匀速运动和静止状态。
在运行的过程中当人体的倾角增大时车轮的加速随之增大以控制车体的平衡,当车体恢复平衡时,以恒定的速度匀速前进。
当转把转动时可实现自动复位功能,在转把的轴径方向安装一个大强度的弹簧,使转把在转动的过程中自动恢复原位,实现了灵活转弯的效果,如果转把的偏向角足够大可以实现原地转弯,使两轮车的运行更加灵活,方便在狭小的地方使用。转把示意图如图4所示。
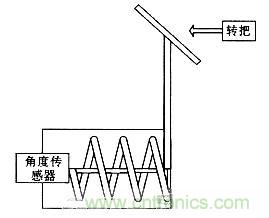
图4 转把示意图
转把的方向和偏向角是通过高精度电位器检测的,在转把的固定轴上安装个角度传感器,实现角度的测量。程序流程图
为了便于程序的开发和以后的使用与维护,全部程序采用模块化结构,即由一个主程序和若干个子程序模块构成。主程序首先完成初始化工作,包括定时器初始化、LCD16 02液晶模块初始化、定时器中断初始化、系统时钟初始化、其他参数的初始化等。然后启动定时器进行定时,开中断允许单片机响应内部中断请求。定时器中断流程图如图6所示。各程序功能模块包括LCD1602液晶显示、电机驱动、动态角度测量、转向、欠压报警等。主程序流程图如图5所示。
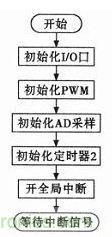
图5 主程序流程图

图6 定时器中断流程图
整个系统软件采用模块化结构。软件系统包括:主程序负责显示。车体直立模块用定时器1中断完成,每进入一次中断完成一次PID算法控制车体平衡,在车体保持平衡状态的情况下通过采集转把数据实现转弯功能。相关阅读:
电动车的充电设备还能隐藏?技术帝为你解答
为何说无负极电池将颠覆电动车和手机电池?
设计攻略:智能电动车DIY大改造,各种方案玩翻天

