
【导读】陀螺供电电源一般为中频(常用的为400Hz)的单相或者三相变频电源。同时,这类电源广泛应用于航空航天、舰船、机车、感应加热以及雷达、通信交换机等设备中。因此,对此类电源的研究具有很高的工程实用价值。本文以某型导弹中半液浮速率陀螺为研究对象,利用SPWM技术给出了半液浮速率陀螺电源的解决方案。同时,提出了基于时序实现逆变电源的三相任意角度差的方法,大大化简了实现角度差。
半液浮速率陀螺电源设计方案
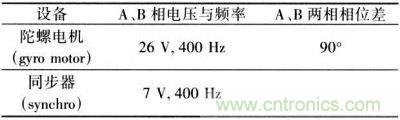
本文研究的半液浮速陀螺电源的具体技术指标如表1所列。
表1:半液浮速率陀螺电源技术要求
SPWM原理及基本方案
SPWM技术是一种先进的调制技术,其内涵就是通过按一定的规律控制开关器件的通断,从而获得一组等幅不等宽的矩形脉冲波形,用来产生所需频率的正弦电压波。采用该技术开发研制的400Hz中频电源,技术先进,其所达到的电性能指标及可靠性都将大大优于以往多环节的中频电源。SPWM的实现方式通常有两种:一是模拟法,二是数字法。模拟法电路较复杂,有温漂现象,影响精度,限制了系统的性能;数字法按照不同的数字模型用计算机算出各切换点,将其存人内存,然后通过查表及必要的计算产生SPWM波。但数字法受内存影响较大,不能保证系统的精度。Mitel公司生产的SA系列PWM波形发生器具有精度高、抗干扰能力强、外围电路简单等优点,其中SA4828系列SPWM发生器,可与微处理器连接,完成外围控制功能,使系统智能化,微处理器只用很少的机时去控制它,因而有能力进行整个系统的检测、保护、控制等。基于上述原因,我们决定采用SA4828为核心来研制SPWM中频电源。
半液浮速率陀螺电源系统设计框图
半液浮速率陀螺供电电源如图1所示。
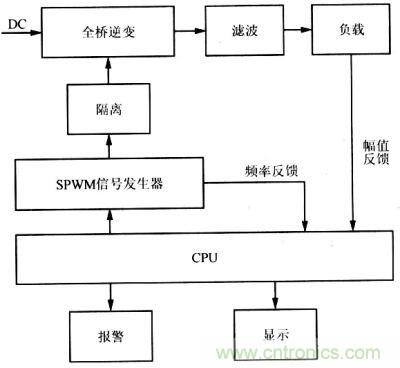
图1:半液浮速率陀螺供电电源方框图
其系统的基本工作原理为:直流电源经过SPWM全桥逆变、滤波隔离后输出,系统采用幅值反馈和频率反馈实现陀螺供电电源的幅值和频率的稳定。CPU采用Intel公司生产的89S52单片机;SPWM信号发生器采用SA4828;混合集成驱动电路EXB841构成隔离驱动保护电路;逆变器主电路采用IGBT模块。
硬件电路设计
SPWM波形发生器
SA4828是Mitel公司专为三相逆变电路设计的SPWM波形发生器,它能产生纯正弦波,尤其与CPU组成的系统操作数字化,抗干扰能力强,接口简单,通用性好,可以与不同接口的微控制器相连。在电路不变的情况下,通过软件修改,就可改变逆变器的性能指标,大大提高了调试效率,降低了产品成本。其主要特点如下所述。
1)全数字化 SA4828与微处理器的连接,适用多种微处理器,接口电路简捷。SA4828与单片机89S52接口电路如图2所示。
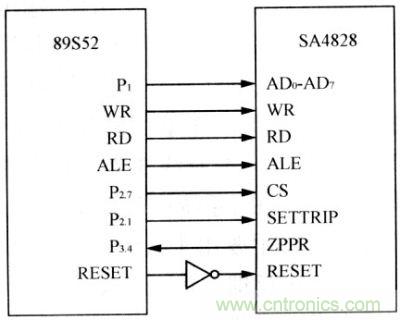
图2:SPWM信号发生器与89S52接口电路
2)工作方式灵活 SA4828有6个标准的TEL电平输出,用来驱动逆变器的6个功率开关器件。可以直接通过软件写寄存器R0、R1、R2、R3、R4、R14、R15设定载波频率、调制频率、凋制比、最小脉宽、死区时间、幅值等工作参数,无需任何外接电路。
3)工作频率范围宽、精度高 三角载波频率可调,载波频率最高可达24kHz,输出调制频率最高可达4 kHz,输出频率的分辨率可达16位字长;全数字化的脉冲输出有很高的精度和温度稳定性。
隔离驱动电路
IGBT的栅极驱动方法有很多,本方案采用日本富士公司推出的混合式集成化IGBT专用驱动模块EXB841。它是EXB系列驱动器中高速、大容量器件之一,集隔离、驱动和保护于一身,性能优越,充分体出了“最优驱动和分散保护”两原则。具体应用电路如图3所示。
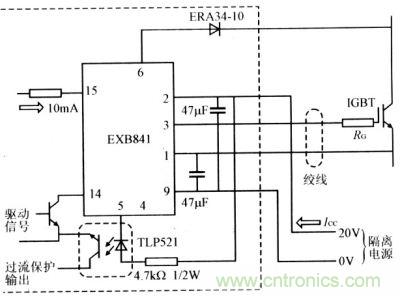
图3:IGBT驱动隔离电路
单片机最小系统及外围扩展芯片
89S52单片机最小系统及少量的扩展外围芯片和SAZ4828三相PWM发生器构成本系统控制电路。单片机完成对SA4828的初始化、输出脉宽控制、频率控制,同时完成开环和闭环控制算法的运算及数据处理、模拟信号与数字信号的检测、保护功能和逻辑判断等。89S52单片机有40条引脚,共分为端口线、电源线、控制线3类。其中端口线分为4组即P0,P1,P2,P3,系统中仅用P0口和P1口进行数据交换,P0口主要用于ADC0809之间进行数据交换,构成电压反馈。P1口主要用于给SA4828传输初始化数据,并根据运算的结果调整SA4828的输出。P3、4口与SA4828的引脚21构成频率反馈。
SA4828工作原理和系统软件设计
SA4828内部结构和工作原理
SA4828内部结构和工作原理框图如图4所示。
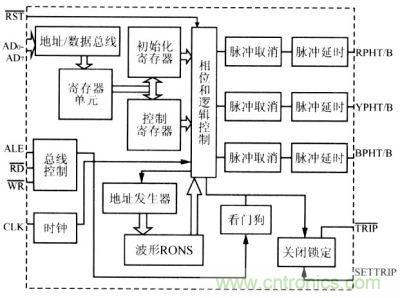
图4:SA4828内部结构和工作原理
它按X(t)=Asinωt来产生SPWM波形。由于SA4828的主要工作原理大部分与SA8282类似,这里不再赘述。现将SA4828特殊的原理解释如下。
1)3种不同波形的选择主要是通过给初始化寄存器和控制寄存器传输命令,来设置三相波形ROM。它分别为正弦、增强、高效3种波形,使之能应用于各种特殊的场合。
2)“看门狗”电路 SA4828在接收单片机发出的命令时,一旦出现问题,总线控制会发出复位“看门狗”信号,使“看门狗”延时关断输出驱动信号。
3)8个寄存器单元为了提高频率精度,以及能独立控制三相波形幅值,SA4828增设了8个寄存器单元,单元地址及说明见表2。
表2:寄存单元地址及说明
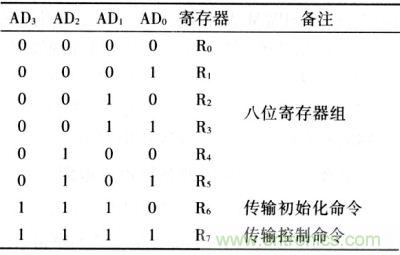
在传输初始化命令时,写入以R5为“看门狗”延时控制字。当传输控制命令时,写入R0、R1为16位频率控制字,写入R3、R4、R5分别为三相输出波形幅值控制字。上述设置和调整,均通过地址/数据总线、寄存器单元,存人初始化寄存器和控制寄存器来完成。
软件设计
软件程序设计是整个逆变器控制的核心,它决定逆变器的输出特性,如电压、频率范围及稳定度、谐波含量、保护功能的完善,可靠性等。图5为本系统的程序流程图。
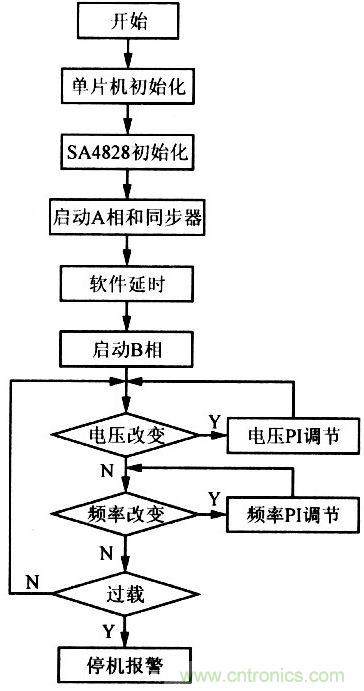
图5:系统程序流程图
主程序中,SA4828初始化命令和控制命令的参数计算及设置,主要用于确定频率调节范围、死区时间、输出电压幅值、中心频率、幅值等。
由陀螺电源技术要求(表1)知,陀螺电机供电电源要求A、B两相相位差90度。这里,采用软件延时方法实现。即当A相输出后延时O.625 ms,B相输出,实现A、B两相相位差90度。
这里提出了基于时序方法实现三相电源中任意两相的任意角度差。解决了逆变电源中难于实现任意两相实现任意角度差的难题。大大简化了逆变电源中任意两相实现任意角度差的繁琐工作和大量的外围电路。但是,带来若干好处的同时也带来了一些问题。譬如,本系统中需要2片SA4828实现A、B两相相位差90度,一定程度上提高了系统的成本。但是,由于SA4828目前的应用较为广泛,其市场的价格也是比较低廉的。综合考虑,利用SA4828软件延时功能实现逆变电源中任意两相任意角度差仍然是最佳的选择方案。
实验结果和结语
实验结果表明,系统方案设计较好地实现了半液浮速率陀螺对供电电源的要求。实现了三相频率稳定度为O.l%、幅值稳定度O.1%的高精密中频电源。利用软件延时的方法,实现了A、B两相相位差90度。同时,系统采用89S52单片机和SA8282信号发生器后,正弦波控制电路大为简化,元器件减少,结构紧凑,降低了成本,提高了可靠性。通过实际测试,取得了比较理想的结果,完全符合实际系统的要求。

