
1 引言
得益于被称为“深度学习”的新一代人工智能软件和更加可靠性能更好的电脑和硬件传感器,在未来几十年里,汽车将获得与人类相似的能力,在无法预测的环境中自主安全驾驶,无人驾驶汽车将逐渐取代由人类驾驶的普通汽车[1];在这个从普通汽车到无人驾驶汽车过渡的过程中,毫米波防撞雷达作为无人驾驶汽车的“眼睛”,收集汽车周边物体的速度,距离,位置等信息;毫米波防撞雷达的研究也成了近年来汽车电子厂商们关注的热点。
2 汽车防撞雷达介绍
应用于汽车的防撞雷达一般工作在两个频段:24GHz-24.25GHz和76GHz-81GHz;工作在24GHz频段的防撞雷达一般安装在汽车后向,实现盲区监测(BSD),变道辅助(LCA)以及倒车侧向警告(RCTA)等功能;工作在76GHz-81GHz频段的毫米波防撞雷达一般安装在汽车前向,用于实现自适应巡航(ACC),紧急制动(AEB)等功能。汽车防撞雷达不同功能覆盖区域如图1所示:

图1 防撞雷达波束覆盖区域示意图
本文所介绍的波束赋形阵列天线工作在77GHz-79GHz,作为安装在汽车后向毫米波防撞雷达的一部分,用于实现BSD,LCA和RCTA功能;相对实现同样功能工作在24GHz的防撞雷达,工作在77GHz频率的雷达具有更高的速度探测精度,更远的探测距离,更好的目标探测分辨率以及更小的尺寸,更易集成在后保险杠或汽车尾灯中等优势。
3波束赋形阵列天线的设计
3.1串馈微带贴片阵列天线
微带天线具有低剖面,重量轻,便于加工,成本低廉,易于与微波电路集成等优点;将微带贴片天线串联馈电组成驻波线阵,能够满足高增益低副瓣等要求,适合用作毫米波防撞雷达天线。
3.1.1理论分析
微带贴片天线可看做一个场量在横向没有变化的开路谐振器[2],其辐射场由贴片长度方向两侧开路缝隙产生,如图2所示
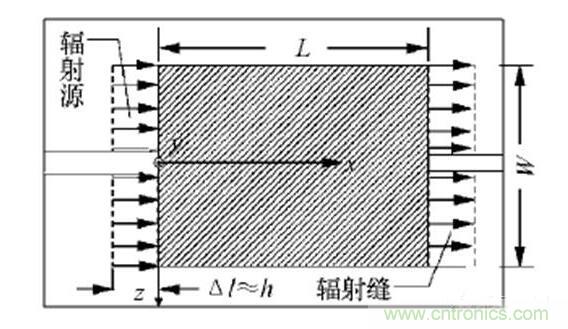
图2 矩形微带贴片天线
通过微带传输线将贴片串联组成串馈驻波阵,贴片间距为;其示意图如图3所示
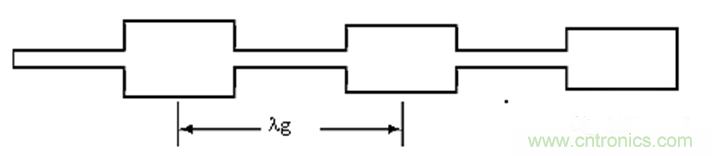
图3 串馈微带贴片线阵结构示意图
在串馈微带贴片阵列中,每个贴片天线的宽度正比于贴片天线等效导纳,而等效导纳又正比于该贴片的激励功率;因此通过并调节线阵中每个贴片的宽度,可以改变该天线的激励功率,从而实现线阵激励的锥削分布,满足防撞雷达天线在俯仰面对于低副瓣的要求。
3.1.2 仿真设计
根据增益与波束宽度的要求确定该串馈微带贴片线阵单元数为10,副瓣电平小于-20dB;采用厚度为5mil的RO3003介质基板,经理论分析与仿真软件优化。仿真模型如图4所示

图4天线仿真模型
天线俯仰面增益方向图如图5所示
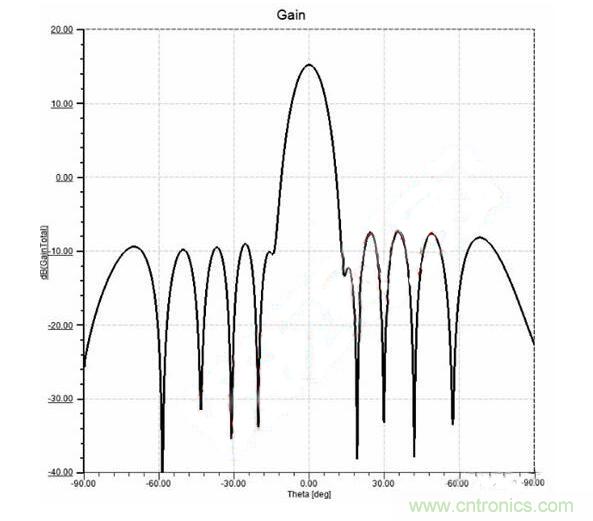
图5 俯仰面增益方向图
线阵增益为15.1dBi,副瓣电平-22.6dB。
将图4的线阵模型等间距排列6行组成如图6所示的面阵
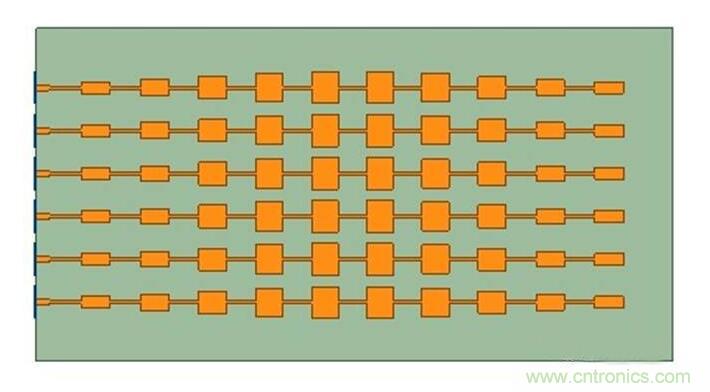
图6 面阵仿真模型
该面阵用于实现水平面方向图的波束赋形。
3.2 PSO粒子群算法优化激励幅度相位
粒子群的基本概念是来自于鸟群觅食行为的研究[3]。与遗传算法类似,粒子群算法也是一种随机搜索方法,不同的是,粒子群优化算法没有选择、交叉、变异等复杂过程,而是依靠个体间的协作来寻取最优解。每个粒子通过跟踪粒子本身找到的最优解Pbest和群体找到的最优解Gbest,更新离子的位置和速度,不断向最优解靠近,最终达到最优解。粒子群算法优化流程图如图7所示
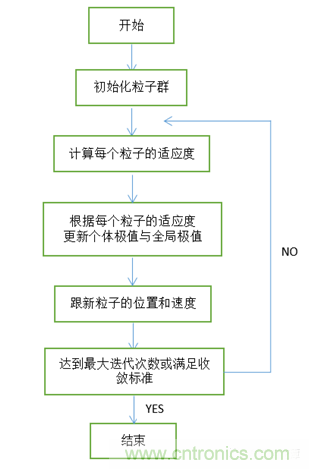
图7 算法优化流程图
从防撞雷达威力图提取出波束赋形的目标方向图,通过PSO优化算法对图6中阵列天线激励幅相值得优化,实现对目标方向图的赋形。在HFSS仿真软件中输入粒子群算法优化得到的激励幅相值,得到仿真方向图与目标方向图如图8所示
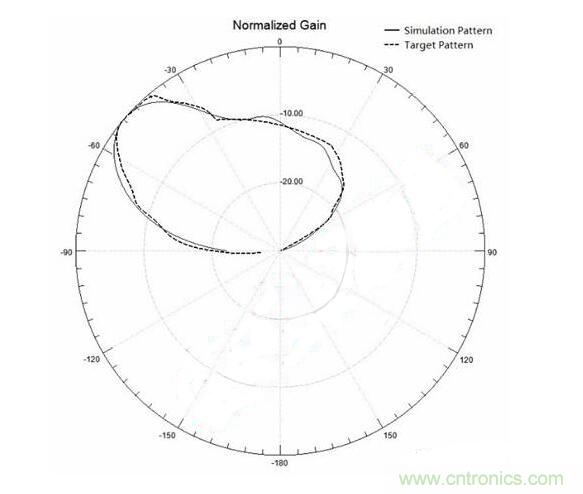
图8波束赋形方向图
从图8可见仿真结果与目标方向图吻合较好,说明粒子群算法优化出的结果可靠。
3.3功分网络的设计
3.2节确定了各线阵激励的幅相值,但图8里的仿真方向图是理想的,现实中需要通过1分6的功分网络来将其实现。常用的功分器有Wilkinson功分器和T型节功分器;Wilkinson功分器只能组成并馈网络,这种网络具有较大的损耗且占用面积大,不利于小型化;而由T型节组成的串馈功分网络具有损耗低占用面积小的优势,更适合于实现3.2节中波束赋形的幅相激励。
3.3.1理论分析
该串馈网络依靠阻抗变换段实现波束赋形的激励幅度,通过改变输出馈线的长度实现波束赋形的激励相位;串馈网络等效电路如图9所示
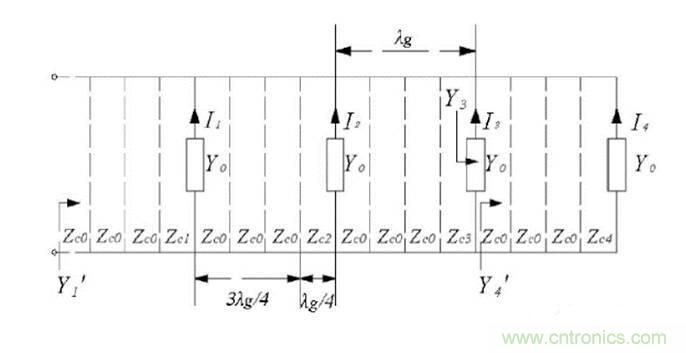
图9串馈网络等效电路
图中Yo为连接功分网络的串馈线阵等效导纳,Zci为各阻抗变换段的特性阻抗,Zco为馈线的特性阻抗;串馈网络输出端口激励电流与阻抗有如下的关系[4]
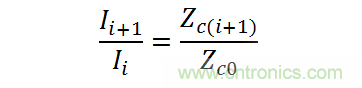
各端口激励电流Ii由3.2节优化得到,传输线特性阻抗Zco已知,可以求出每节阻抗变换段对应的特性阻抗,从而可以得到该特性阻抗对应的宽度微带线宽。
3.3.2 仿真设计
功分网络仿真模型如图10所示,
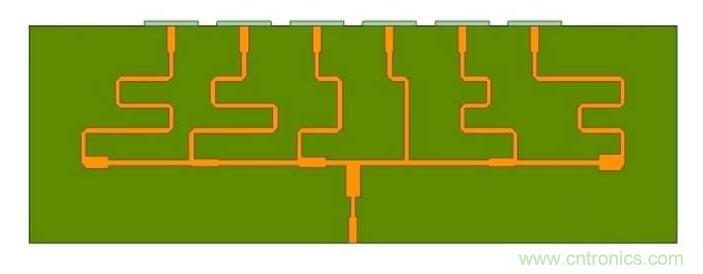
图10功分网络仿真模型
仿真得到的激励幅相数据如表1所示
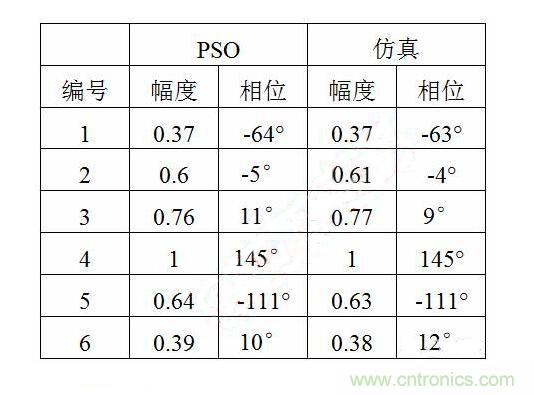
表1 仿真与PSO优化幅相数据
从表1中可以看出,该功分网络较好的实现了PSO优化出的激励幅相值。
3.4整体仿真结果
图10功分网络与图6中面阵连接成如图11的仿真模型
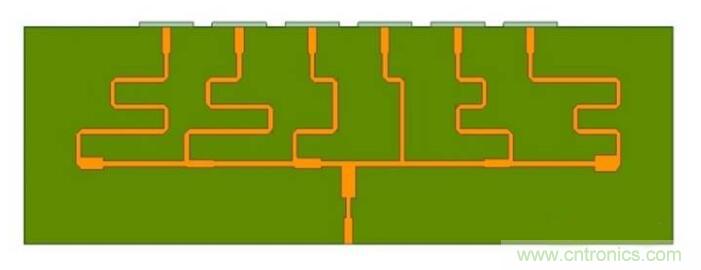
图11整体仿真模型
仿真得到的方位面方向图与目标方向图对比如图12所示
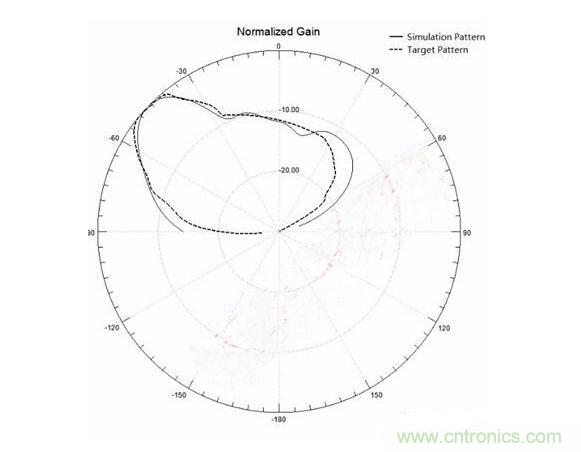
图12仿真与目标方向图对比
从图12可见仿真方向图在-60°~+36°范围内与目标方向图吻合较好,在此范围之外与目标方向图略有差异;这是由于天线对网络耦合影响了网络实际输出的幅度和相位,仿真方向图在远离主波束的角度与目标方向图有些差异;该仿真方向图总体可以满足后向防撞雷达BSD,LCA,RCTA三种功能应用。
4 结论
本文设计了一种工作在77GHz-79GHz频段,用于汽车后向防撞雷达的波束赋形阵列天线;首先根据雷达对于俯仰面方向图高增益低副瓣的需求,设计了串馈贴片线阵,实现了-22.6dB的副瓣电平;然后将6条线阵等间距排布组成面阵,通过PSO粒子群优化算法优化出可以实现方位面赋形波束的激励幅相值;接着设计了1分6的串馈功分网络实现了优化算法得到的激励幅相,最后将网络与天线面阵连接完成波束赋形阵列天线的设计。该波束赋形阵列仿真方向图与目标方向图吻合较好,对应用于77GHz汽车防撞雷达的赋形天线设计具有一定的参考价值。
推荐阅读:
想了解无线传能充电器是如何工作的吗?
超声波感应器会被用于何处?——第一部分
温习一下大学的传感器知识,做开发这些器件必须精通
为什么要将超声波传感器用于无人机设计?

