
【导读】“雷达”是一种利用电磁波探测目标位置的电子设备。电磁波其功能包括搜索目标和发现目标;测量其距离,速度,角位置等运动参数;测量目标反射率,散射截面和形状等特征参数。传统的雷达是微波和毫米波波段的电磁波为载波的雷达。激光雷达以激光作为载波。可以用振幅、频率、相位和振幅来搭载信息,作为信息载体。

激光雷达利用激光光波来完成上述任务。可以采用非相干的能量接收方式,这主要是一脉冲计数为基础的测距雷达。还可以采用相干接收方式接收信号,通过后置信号处理实现探测。激光雷达和微波雷达并无本质区别,在原理框图上也十分类似,见下图
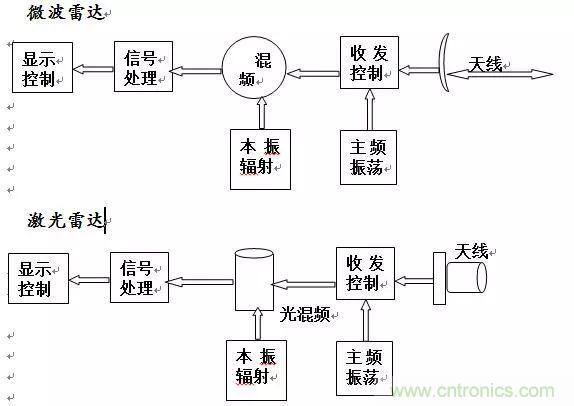
激光雷达是工作在光频波段的雷达。与微波雷达的原理相似,它利用光频波段的电磁波先向目标发射探测信号,然后将其接收到的同波信号与发射信号相比较,从而获得目标的位置(距离、方位和高度)、运动状态(速度、姿态)等信息,实现对目标的探测、跟踪和识别。
激光雷达由发射,接收和后置信号处理三部分和使此三部分协调工作的机构组成。激光光速发散角小,能量集中,探测灵敏度和分辨率高。多普勒频移大,可以探测从低速到高速的目标。天线和系统的尺寸可以作得很小。利用不同分子对特定波长得激光吸收、散射或荧光特性,可以探测不同的物质成分,这是激光雷达独有的特性。
激光雷达的种类
目前,激光雷达的种类很多,但是按照现代的激光雷达的概念,常分为以下几种:
按激光波段分:有紫外激光雷达、可见激光雷达和红外激光雷达。
按激光介质分:有气体激光雷达、固体激光雷达、半导体激光雷达和二极管激光泵浦固体激光雷达等。
按激光发射波形分:有脉冲激光雷达、连续波激光雷达和混合型激光雷达等。
按显示方式分:有模拟或数字显示激光雷达和成像激光雷达。
按运载平台分:有地基固定式激光雷达、车载激光雷达、机载激光雷达、船载激光雷达、星载激光雷达、弹载激光雷达和手持式激光雷达等。
按功能分:有激光测距雷达、激光测速雷达、激光测角雷达和跟踪雷达、激光成像雷达,激光目标指示器和生物激光雷达等。
按用途分:有激光测距仪、靶场激光雷达、火控激光雷达、跟踪识别激光雷达、多功能战术激光雷达、侦毒激光雷达、导航激光雷达、气象激光雷达、侦毒和大气监测激光雷达等。
在具体应用时,激光雷达既可单独使用,也能够同微波雷达,可见光电视、红外电视或微光电视等成像设备组合使用,使得系统既能搜索到远距离目标,又能实现对目标的精密跟踪。
激光雷达与微波雷达比较
激光雷达的波长比微波短好几个数量级,又有更窄的波束。因此,于微波雷达相比,激光雷达具有如下优点:
1、角分辨率高,速度分辨率高和距离分辨率高。采用距离-多普勒成像技术可以得到运动目标的高分辨率的清晰图象。
2、抗干扰能力强,隐蔽性好;激光不受无线电波干扰,能穿越等离子鞘,低仰角工作时,对地面多路径效率不敏感。激光束很窄,只有在被照射的那一点,那瞬间,才能被接收,所以激光雷达发射的激光被截获的概率很低。
3、激光雷达的波长短,可以在分子量级上对目标探测。这是微波雷达无能为力的。
4、在功能相同的情况下,比微波雷达体积小,重量轻。

当然,激光雷达也有如下缺点:
1、激光受大气及气象影响大。大气衰减和恶劣天气使作用距离降低。此外,大气湍流会降低激光雷达的测量精度。
2、激光束窄,难以搜索目标和捕获目标。一般先有其他设备实施大空域、快速粗捕目标,然后交由激光雷达对目标进行精密跟踪测量。
激光雷达探测原理
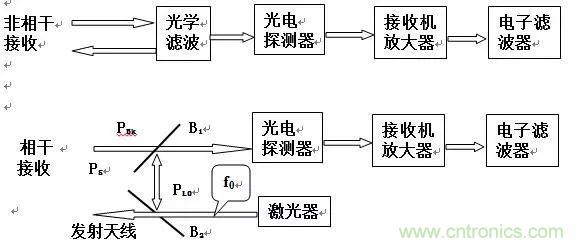
激光雷达最重要的性能参数是系统信噪比(SNR)。下图给出了激光雷达的非相干和相干接收机方框图。
背景噪声
非相干接收机除了信号光功率Ps以外,还有附加项,即背景光功率PBK。。它是由太阳光和物体的自身辐射,物体对辐射的反射、漫反射和闪烁等引起的不必要的噪声信号在接收机非线性光探测器中变为电信号和被放大,经过匹配滤波器和其他抑制噪声的措施后,产生一个视频带宽的有效信号。
相干接收机中,除了激光器所发出的频率为f0的信号光外还有经过光束分束器的本振光。信号光的回波和本振光一同耦合到光探测。除了接收到光信号光功率PS,外本地震荡光功率PLo,它们一同与背景噪声项PBK相竞争,结果就压抑了噪声。
背景噪声有:
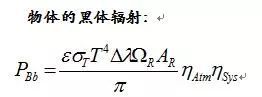
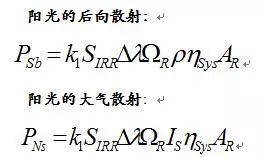
上式中,ε是目标的辐射系数;ρ是目标的反射系数;T是目标的温度(K);Δλ是光波长范围(μm);AR是接收机探测器敏感面面积(m²);k1是太阳光通过大气的透过系数;SIRR是太阳的辐射度();IS是大气的散射系数;ηSys是系统的光学效率;ΩR是辐射体辐射的能量的立体角;σT是斯特藩-玻耳兹曼常数。
信噪比的表达
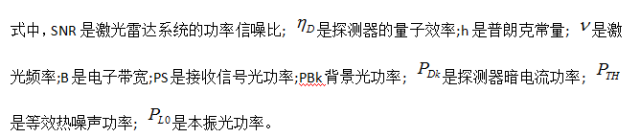
式中, 是信号电流的均方值; 是散弹噪声电流的均方值; 是热噪声电流的均方值; 是背景噪声电流的均方值; 是暗电流的均方值;是本振电流的均方值。
将以上电流代入信噪比SNR方程可以得到非相干和相干激光雷达信噪比方程:
非相干激光雷达的信噪比SNR方程可以表示为:
相干激光雷达的信噪比SNR方程表示为:
激光雷达关键技术分析
空间扫描技术
激光雷达的空间扫描方法可分为非扫描体制和扫描体制,其中扫描体制可以选择机械扫描、电学扫描和二元光学扫描等方式。非扫描成像体制采用多元探测器,作用距离较远,探测体制上同扫描成像的单元探测有所不同,能够减小设备的体积、重量,但在我国多元传感器,尤其是面阵探测器很难获得,因此国内激光雷达多采用扫描工作体制。
机械扫描能够进行大视场扫描,也可以达到很高的扫描速率,不同的机械结构能够获得不同的扫描图样,是目前应用较多的一种扫描方式。声光扫描器采用声光晶体对入射光的偏转实现扫描,扫描速度可以很高,扫描偏转精度能达到微弧度量级。但声光扫描器的扫描角度很小,光束质量较差,耗电量大,声光晶体必须采用冷却处理,实际工程应用中将增加设备量。
二元光学是光学技术中的一个新兴的重要分支,它是建立在衍射理论、计算机辅助设计和细微加工技术基础上的光学领域的前沿学科之一。利用二元光学可制造出微透镜阵列灵巧扫描器。一般这种扫描器由一对间距只有几微米的微透镜阵列组成,一组为正透镜,另一组为负透镜,准直光经过正透镜后开始聚焦,然后通过负透镜后变为准直光。当正负透镜阵列横向相对运动时,准直光方向就会发生偏转。这种透镜阵列只需要很小的相对移动输出光束就会产生很大的偏转,透镜阵列越小,达到相同的偏转所需的相对移动就越小。因此,这种扫描器的扫描速率能达到很高。二元光学扫描器的缺点是扫描角度较小(几度),透过率低,目前工程应用中还不够成熟。
激光发射机技术
目前,激光雷达发射机光源的选择土要有半导体激光器、半导体泵浦的固体激光器和气体激光器等。
半导体激光器是以直接带隙半导体材料构成的Pn结或Pin结为工作物质的一种小型化激光器。半导体激光器工作物质有几十种,目前已制成激光器的半导体材料有砷化镓(GaAs)、砷化铟(InAs)、锑化钢(InSb)、硫化镉(Cds)、碲化镉(cdTe)、硒化铅(PbSe)、碲化铅(PbTe)等。半导体激光器的激励方式主要有电注入式、光泵式和高能电子束激励式。绝大多数半导体激光器的激励方式是电注入,即给Pn结加正向电压,以使在结平面区域产生受激发射,也就是说是个正向偏置的二极管,因此半导体激光器又称为半导体激光器_极管。自世界上第一只半导体激光器在1962年问世以来,经过几十年来的研究,半导体激光器得到了惊人的发展,它的波长从红外到蓝绿光,覆盖范围逐渐扩大,各项性能参数不断提高,输出功率由几毫瓦提高到千瓦级(阵列器件)。在某些重要的应用领域,过去常用的其他激光器已逐渐为半导体激光器所取代。

半导体泵浦固体激光器综合了半导体激光器与固体激光器的优点,具有体积小、重量轻、量子效率高的特点。通过泵浦激光T作物质,输出光束质量好、时间相干性和空间相干性好的泵浦光,摒弃了半导体激光器光束质量差、模式特性荠的缺点,与氙灯泵浦同体激光器相比具有泵浦效率高、T作寿命长、稳定可靠的优点。激光工作物质可以选择钕(Nd)、铥(Tm)、钬(Ho)、铒(Er)、镱(Yb)、锂(Li)、铬(Cr)等,获得从1.047~2.8μm的多种波。目前,半导体泵浦固体激光器的许多工程应用问题已经得到解决,是应用前景最好、发展最快的一种激光器。
气体激光器是目前种类较多、输出激光波长最丰富、应用最广的一种激光器。其特点是激光输出波长范围较宽;气体的光学均匀性较好,因此输出的光束质量好,其单色性、相干性和光束稳定性好。
高灵敏度接收机设计技术
激光雷达的接收单元由接收光学系统、光电探测器和回波检测处理电路等组成,其功能是完成信号能量汇聚、滤波、光电转变、放大和检测等功能。对激光雷达接收单元设计的基本要求是:高接收灵敏度、高回波探测概率和低的虚警率。在工程应用中,为提高激光测距机的性能而采用提高接收机灵敏度的技术途径,要比采用提高发射机输出功率的技术途径更为合理、有效。提高激光回波接收灵敏度的方法主要是接收机选用适当的探测方式和光电探测器。
探测器足激光接收机的核心部件,也是决定接收机性能的关键因素,因此,探测器的选择和合理使用是激光接收机设计中的重要环节。目前,用于激光探测的探测器可分为基于外光电效应的光电倍增管和基于内光电效应的光电二极管及雪崩光电二极管等,由于雪崩光电二极管具有高的内部增益、体积小、可靠性好等优点,往往是工程应用中的首选探测器件。
激光雷达的回波信号电路主要包括放大电路和阈值检测电路。放大电路的设计要与回波信号的波形相匹配,对于不同的回波信号(如脉冲信号、连续波信号、准连续信号或调频信号等),接收机要有与之相匹配的带宽和增益。如对于脉冲工作体制的激光雷达,放大电路要有较宽的带宽,同时还要采用时问增益控制技术,其放大器增益不是固定的,而是按激光雷达方程变化曲线设计的控制曲线,以抑制近距离后向散射,降低虚警,并使放大器丰要工作于线性放大区域。
阈值检测电路是一个脉冲峰值比较器,确定回波到达的判据是回波脉冲幅值超过阈值。这种方法的优点是简单,但存在两个主要缺点。首先,只要有一个脉冲幅值首先超越阂值,检测电路就会将其确定为回波,而不管它是同波脉冲还是杂波干扰脉冲,从而导致虚警;其次是回波脉冲幅度的变化会引起到达时间的误差,从而导致测距误差。在高精度激光测距机中,通常采用峰值采样保持电路和恒比定时电路来减小测时误差。
终端信息处理技术
激光雷达终端信息处理系统的任务是既要完成对各传动机构、激光器、扫描机构及各信号处理电路的同步协调与控制,又要对接收机送出的信号进行处理,获取目标的距离信息,对于成像激光雷达来说还要完成系统三维图像数据的录取、产生、处理、重构等任务。
目前激光雷达的终端信息处理系统设计采用主要采用大规模集成电路和计算机完成。其中测距单元可利用FPGA技术实现,在高精度激光雷达中还需采用精密测时技术。对于成像激光雷达来说,系统还需要解决图像行的非线性扫描修正、幅度/距离图像显示等技术。回波信号的幅度量化采用模拟延时线和高速运算放大器组成峰值保持器,采用高速A/D完成幅度量化。图像数据采集由高速DSP完成,图像处理及三维显示可由工业控制计算机完成。
激光雷达的应用
激光雷达技术在城市三维建筑模型中的应用
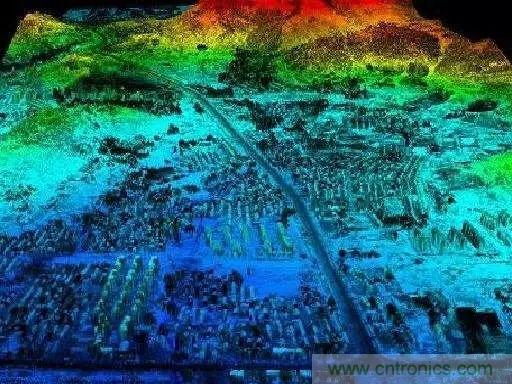
“数字城市”是数字地球技术系统的重要组成部分,而表达城市主要物体的三维模型包括三维地形,三维建筑模型、三维管线模型。这些三维建筑模型是数字城市重要的基础信息之一。
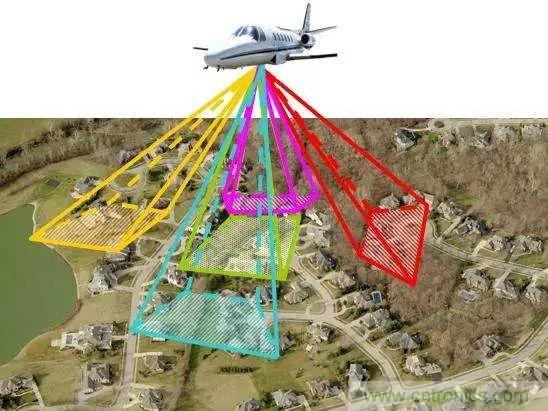
而激光雷达技术可以快速完成三维空间数据采集,它的优点使它有很广阔的应用前景。机载雷达系统的组成包括:激光扫描器、高精度惯性导航仪、应用查分技术的全球定位系统、高分辨率数码相机。通过这四种技术的集成可以快速的完成地面三维空间地理信息的采集,经过处理便可得到具有坐标信息的影像数据。利用激光进行三维建筑建模的技术。首先,进行数据预处理。就是结合IMUU记录的姿势参数、机载GPS数据、地面基站GPS观察数据、GPS偏心分量、扫描仪和数码相机各自的偏心分量,进行GPS/IMU联合解算,得到扫描仪及相机曝光坐标下的轨迹文件,进而得到外方为元素。其次,使用LIDAR数据商业处理软件将地面数据与非地面数据分离,生成DEM,在利用纯地表数据对影像外方位元素通过寻找同名像点的方式进行校正快速生成DOM。DEM和DOM叠加在一起就形成了三维地形模型。最后,为了表达真实的城市面貌对三维建筑模型进行纹理贴图。纹理粘贴的方法常见的有手动粘贴和纹理映射两种。常用的纹理获取方法也有两种,第一种方法是对建筑顶部纹理采用航空影像,侧面纹理信息为手持相机实地拍摄。第二种方法为倾斜航空摄影。得到纹理后利用专业软件进行纹理面的选择、匀光处理等将反应建筑现状的影像信息映射在对应的模型上就达到了反映城市现状的目的。
激光雷达技术在大气环境监测中的应用
激光雷达由于探测波长短、波束定向性强,能量密度高,因此具有高空间分辨率、高的探测灵敏度、能分辨被探测物种和不存在探测盲区等优点,已经成为目前对大气进行高精度遥感探测的有效手段。利用激光雷达可以探测气溶胶、云粒子的分布、大气成分和风场的垂直廓线,对主要污染源可以进行有效监控。
对大气污染物分布的观测。当激光雷达发出的激光与这些漂浮粒子发生作用时会发生散射,而且入射光波长与漂浮粒子的尺度为同一数量级,散射系数与波长的一次方成反比,米氏散射激光雷达依据这一性质可完成气溶胶浓度、空间分布及能见度的测定。
差分激光雷达主要用于大气成分的测定。差分激光雷达的测试原理是使用激光雷达发出两种不等的光,其中一个波长调到待测物体的吸收线,而另一波长调到线上吸收系数较小的边翼,然后以高重复频率将这两种波长的光交替发射到大气中,此时激光雷达所测到的这两种波长光信号衰减差是待测对象的吸收所致,通过分析便可得到待测对象的浓度分布。
在大气中间层金属蒸气层的观测主要采用荧光共振散射激光雷达。其原理是利用Na、K、Li、Ca等金属原子作为示踪物开展大气动力学研究。由于中间层顶大气分子密度较低,瑞利散射信号十分微弱,而该区域内的钠金属原子层由于其共振荧光截面比瑞利散射截面高几个数量级,因此,利用钠荧光雷达研究钠层分布,进而研究重力波等有关性质更展示其独有的特性。
激光雷达在油气直接勘察中的应用
利用遥感直接探测油气上方的烃类气体的异常是一种直接而快捷的油气勘探方法。激光雷达是激光技术和雷达技术相结合的产物,将其应用于油类勘测已经成为可能。激光器的工作波长范围广,单色性好,而且激光是定向辐射,具有准直性,测量灵敏度高等优点,使其在遥感方面远优于其他传感器。
激光雷达由发射系统和接收系统两大部分组成。发射系统主要包括激光器和发射望远镜;接受系统主要由接收望远镜、光电倍增管和显示器三部分组成。激光雷达技术是根据激光光束在大气中传输时,大气中尘埃微粒和各种气体分子对激光产生弥散射,瑞利散射、拉曼散射和共振荧光以及共振吸收等现象,然后利用激光雷达接收系统收集和记录上述现象过程中所产生的背向散射光谱,以达到探测大气成份和浓度的目的。
烃类气体是油气田油气微渗漏的主要指示性气体,而近地表的烃类气体从成分上看,主要是由早期的成岩作用、细菌作用和地下热作用等共同作用的结果。共振吸收激光雷达在探测气体分子含量时一般都采用各种可调谐激光器激光雷达探测气体的探测灵敏度,是指激光雷达所能接收到的激光功率细微变化的能力。探测的距离和被测气体分子的吸收截面是影响探铡灵敏度的主要因素。据研究资料介绍,吸收截面越大灵敏度越高;而探测距离越大,灵敏度越高。而路径与灵敏度之间的关系是路径越长,气体分子对激光光束的吸收衰减也越强烈,从而使探测灵敏度大大提高。但是,由于存在着激光光斑的发散和因大气湍流引起的激光传输方向改变的抖动效应,将使激光的有效利用率减小,即信噪比下降,从而影响污染气体分子含量的探测精度。因此探测距离以数公里为宜。
利用激光雷达进行气象研究
激光雷达是一种非常重要的气象仪器,它是基于电磁能量会从目标反射回来的检测原理。像雷达一样,有关目标的性质、距离、角度等数据都可以通过光的散射给我们提供出来。其比雷达更为优秀的是它不仅可以在微波区域进行操作,而且可以在可见光、红外光或更短的区域进行操作。激光雷达是雷达在光学电磁频谱上的一个延拓。由激光发射机生成一个短脉冲的能量再针对一个目标发射出去。目标辐射出的散射波由接收光学系统收集并且集中到一个敏感的探测器上,它将入射光的能量转换成一个电信号,经过放大信号处理后再进行使用。
在斯坦福研究所开发的第一个比较原始的仪器设计清楚地表明了激光雷达的应用,如通过雨水或底层的云的结构探测云和雾层的位置,上升限度的高度。激光雷达回波可以清楚的从低海拔地区观察到一个清晰的连续气溶胶层,而这对于肉眼来说是不可见。
SRI Mark III的激光雷达,对稀薄的卷云的检测展示了一个更高的水平。它表明一个很高的峰值功率可以穿透云层,同时形成反射。利用这种现象在不同海波高度观察时就可以证明几个不同层的卷云的存在。虽然用激光雷达性能优越,除了优化设计系统中的参数之外,许多技术被利用来改善的激光雷达系统的性能。例如激光器的冷却就是所有激光器必须解决的问题。激光雷达脉冲重复频率较低或泵浦阈值较低时可以采用空气制冷,而以更大的激光脉冲能量时必须采用制冷系统来冷却激光器。
激光雷达应用在汽车及交通运输领域的相关技术
自动泊车技术
自动泊车系统一般在汽车前后四周安装感应器,这些感应器既可以充当发送器,也可以充当接收器。它们会发送激光信号,当信号碰到车身周边的障碍物时会反射回来。然后,车载计算机会利用其接收信号所需时间确定障碍物的位置。也有部分自动泊车系统采用保险杠上安装摄像头或者雷达来检测障碍物。总的来说其原理是一样的,汽车会检测到已停好的车辆、停车位的大小以及与路边的距离,然后将车子驶入停车位。
其工作模式为如下,当汽车移动到前车旁边时,系统会给驾驶员一个信号,告诉他应该停车的时间。然后,驾驶员换倒挡,稍稍松开刹车,开始倒车。然后,车上的计算机系统将接管方向盘。计算机通过动力转向系统转动车轮,将汽车完全倒入停车位。当汽车向后倒得足够远时,系统会给驾驶员另一个信号,告诉他应该停车并换为前进挡。汽车向前移动,将车轮调整到位。最后,系统再给驾驶员一个信号,告诉他车子已停好。
ACC主动巡航技术
ACC系统包括雷达传感器、数字信号处理器和控制模块。司机设定预期车速,系统利用低功率雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速,使车辆和前车保持一个安全的行驶距离。当前方道路没车时又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。主动巡航控制系统代替司机控制车速,避免了频繁地取消和设定巡航控制,使巡航系统适合于更多的路况,为驾驶者提供了一种更轻松的驾驶方式。
当前应用到ACC系统上的雷达主要有单脉冲雷达、毫米波雷达、激光雷达以及红外探测雷达等。单脉冲雷达和毫米波雷达是全天候雷达,可以适用各种天气情况,具有探测距离远、探测角度范围大、跟踪目标多等优点。激光雷达对工作环境的要求较高,对天气变化比较敏感,在雨雪天、风沙天等恶劣天气探测效果不理想,探测范围有限,跟踪目标较少,但其最大的优点在于探测精度比较高且价格低。红外线探测在恶劣天气条件下性能不稳定,探测距离较短,但价格便宜。
自动刹车技术
高致死率的汽车交通事故推动了自动紧急制动系统的发展。自动紧急制动系统的监测系统由一个嵌入格栅的雷达、一个安装于车内后视镜前端的摄像头及一个中央控制器组成。雷达监测汽车前方的物体和距离,而摄像头探测物体类型型。高清摄像头监测行人和自行车运动轨迹。中央控制控制器监测全局信息并分析交通状况。当出现状况时发出警示信号提醒司机,若司机未能及时做出反应,系统也将强制控制车辆制动。
无人自驾技术
福特公司推出的无人自驾汽车中使用。其名为“激光雷达系统”,本系统在车顶安装四个可旋转激光雷达传感器,持续向四周发射微弱激光束,从而实时勾勒出汽车周围360度3D街景,同时结合360摄像头以帮助汽车观察周围环境,系统将收集到的信息进行分析,区分恒定不变的固体(车道分隔,出口坡道,公园长椅等)以及不断移动的物体(受惊的小鹿,行人,迎面而来的车辆等),并将所有的数据都汇总在一起,再根据密歇根大学开发的算法判断周围环境,从而做出相应的反应。

汽车快速成型技术
于1990年激光雷达的快速成型技术是在计算机技术、高分子材料技术、激光技术、CAD/CAM技术、精密机械技术等发展下产生的,激光雷达扫描系统的快速成型技术主要应用于样件汽车模型的制作和模具的幵发,这项技术能够较大的缩短新产品的幵发周期,降低了开发的成本,并且能够使新产品的市场竞争力得到了提高。还能够应用在汽车的零部件上,多用于分析和检验加工的工艺性能、装配性能、相关的工装模具以及测试运动特性、风洞实验和表达有限元分析结果的实体等。利用激光雷达的非接触式测量、高精度、检测速度快等特点,在汽车车身的三维检测和幵发设计过程中,激光雷达得到了广泛的应用。利用激光雷达测量得到车身的点云数据,对车身进行逆向设计,将点云数据进行预处理,然后进行曲线、曲面、实体模型的重构,最终实现车身模型重现的目的。
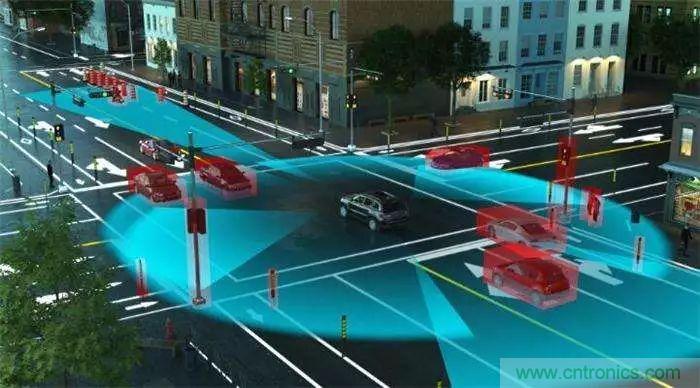
激光雷达与智能交通信号控制
在城市重要交通路口信号控制系统中集成一个地面三维激光扫描系统,通过激光扫描仪对一定距离的道路进行连续扫描,获得这段道路上实时、动态的车流量点云数据,通过数据处理获得车流量等参数,根据对东西向和南北向车流量大小的比较以及短暂车流量预测,从而自动调节东西向和南北向信号灯周期。
激光雷达与交通事故勘查
运用三维激光扫描仪对事故现场进行三维扫描,现场取证,扫描仪的数据能够生成事故现场的高质量图像和细节示意图,便于后期提取调查和法庭审理。
调查表明,用三维激光扫描仪采集事故现场数据平均每次减少90分钟的道路封闭时间。
本文转载自传感器技术。
推荐阅读:

