【导读】面对当今传感器所产生的多种输出电压摆幅,匹配传感器输出和 ADC 输入范围往往很难。本文为不同变化范围的差分、单端、单极性和双极性信号提供简便但高性能的 ADC 输入驱动器解决方案,可采用采用多种单端信号驱动低功率、1Msps、±2.5V 差分输入、16 位 ADC。
本文的所有电路採用了 LTC2383-16 ADC 单独工作或与 LT6350 ADC 驱动器一起工作来实现 92dB SNR。LTC2383-16 是一款低噪声、低功率、1Msps、16 位 ADC,具备 ±2.5V 的全差分输入范围。LT6350 是一款轨至轨输入和输出的、低噪声、低功率单端至差分转换器/ADC 驱动器,具备快速稳定时间。运用 LT6350,0V 至 2.5V、0V 至 5V 和 ±10V 的单端输入范围可以很容易转换为 LTC2383-16 的 ±2.5V 全差分输入范围。
全差分驱动
图 1 显示了用于本文所述所有电路的基本构件。该基本构件用于至 LTC2383-16 模拟输入的DC 耦合全差分信号。电阻器 R1、R2 和电容器 C1 将输入带宽限制到大约 500kHz。电阻器 R3 和 R4 减轻 ADC 输入采样尖峰的影响,该尖峰可能干扰传感器或 ADC 驱动器输入。
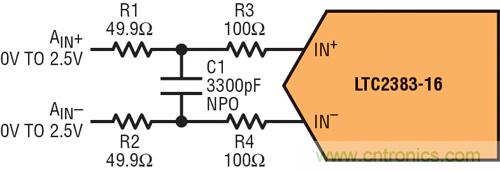
图 1:全差分驱动电路
这个电路对于具备低阻抗差分输出的传感器很有用。驱动 AIN+ 和 AIN– 的共模电压必须等于 VREF/2,以满足 LTC2383-16 的共模输入范围要求。
图 1 中的电路可以是 AC 耦合的,以在必要时,使 ADC 输入的共模电压与传感器相匹配。只需通过一个 1k 电阻器将AIN+ 和 AIN– 偏置到 VCM (VCM=VREF/2)、通过一个 10µF 电容器将传感器输出耦合到AIN+ 和 AIN– 即可,如图 2 所示。
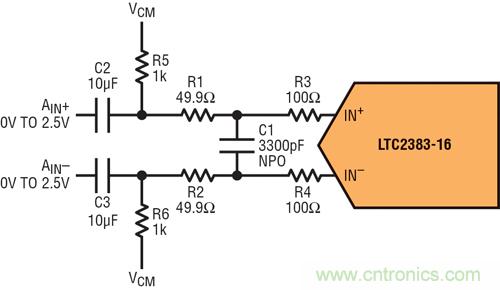
图 2:AC 耦合全差分驱动电路
当驱动 LTC2383-16 这类低噪声、低失真 ADC 时,选择合适的组件对保持高性能是至关重要的。这些电路中使用的所有电阻器的值都相对较低。这可保持较低的噪声和较短的稳定时间。建议使用金属薄膜电阻器,以减小由自热引起的失真。C1 采用的是 NPO 电容器,因为这类电容器的电压系数较低,从而可最大限度地减小失真。
单端至差分的转换
当然,不是所有传感器的输出都是差分的。以下是一些用单端信号驱动 LTC2383-16 的方法。
0V 至 2.5V 单端输入
图 3 所示电路将 0V 至 2.5V 单端信号转换为全差分 ±2.5V 信号。这个电路还具备高阻抗输入,以便能用大多数传感器输出直接驱动该电路。如图2 所示,通过 AC 耦合的VIN,VIN 端的共模电压可以与 ADC 匹配。第二个放大器的共模电压在 LT6350 的 +IN2 引脚处设定。图 4 中的 32k 点 FFT 显示运用图 3 所示电路时 LTC2383-16 与 LT6350 合起来的性能。所测得的 92dB SNR 和 -107dB THD 与 LTC2383-16 的典型数据表规格参数紧密匹配。这表明,在信号通路中插入单端至差分转换器后,即使引起 ADC 规格参数劣化,裂化程度也是极小的。
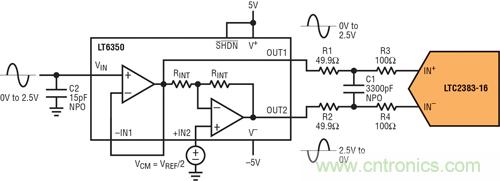
图 3:单端至差分转换器
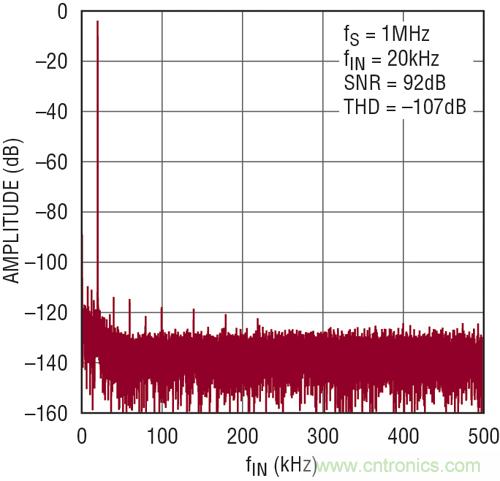
图 4:图 3 电路的 FFT
AMPLITUDE:幅度
下页内容:0V 至 5V 单端输入和±10V 单端输入
[page]
0V 至 5V 单端输入
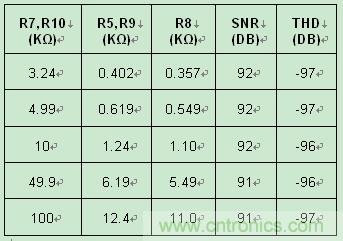
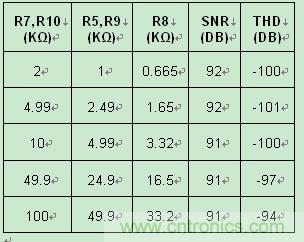
如果需要较宽的输入范围,那么可以驱动 LT6350 的负输入,从而允许由 LT6350 的第一级衰减输入电压。图 5 所示电路将 0V 至 5V 单端信号转换为 ±2.5V 的差分信号,该差分信号驱动 LTC2383-16 的输入。这个电路的输入阻抗等于 R7。增大 R7 的值会提高输入阻抗,从而使驱动更加容易。这么做的代价是,如果 R7 增大到高于 4.99k,那么噪声和失真会略有提高,如表 1 所示。
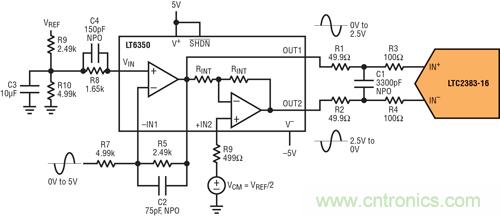
图 5:0V 至 5V 单端驱动器
表 1:0V 至 5V 驱动器的噪声和失真随输入电阻的变化
±10V 单端输入
有些传感器提供高于和低于地的输出电压。图 6 所示电路将 ±10V 的地参考单端信号转换为 ±2.5V 差分信号,该差分信号驱动 LTC2383-16 的输入。输入阻抗仍然由 R7 设定。表 2 显示了图 6 电路的噪声和失真随输入阻抗的变化。
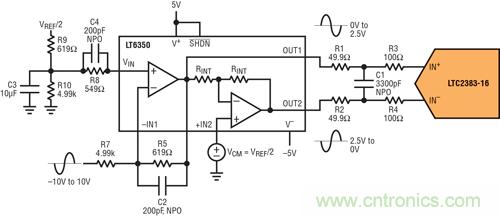
图 6:±10V 单端驱动器
表2:采用 ±10V 驱动器时噪声和失真随输入电阻的变化