
【导读】此文来自于同济大学汽车学院白杰教授在2017上海智能网联新能源汽车高峰论坛上的分享,详细阐述了车载毫米波雷达对当前智能驾驶的意义,以及对未来雷达技术的发展方向的探讨。

智能驾驶的背景与进程
现在对自动驾驶、智能驾驶、智能网联,有很多各种各样的定义。在这些定义里面,ADAS 系统是我们通常说的智能驾驶员辅助系统,「ADAS 系统」一般来说在 Level 0 到 Level 1,具备单一的控制功能。当复数的ADAS系统搭载在一辆车里面之后,我们把它定义为「准自动驾驶」,或者说已经接近自动驾驶。如图1所示,准自动驾驶里面,包括「驾驶员负全责」以及「驾驶员与系统」的切换,这个部分都属于准自动驾驶的领域。

图1自动驾驶的内容与定义
「完全自动驾驶」就是说汽车由整个自动驾驶系统负责任,包括加速、转向、制动都由汽车来操纵。这是自动驾驶大致的内容和定义。图1中没有提完全无人驾驶,就是说整个车完全无人的话,应该在这上面还有一层,估计到那个时候,汽车工业可能是另外一种形态,就是说汽车工业可能来到后汽车工业时代,所以没有把这一部分表达出来。
大家可以看到,自动驾驶进入市场的时间上大致在2020年或者2025年,可能这是限于一些高档车型以试验性质来运行的时间。就是说,实际到我们一般人买的车里面出现自动驾驶的话,估计还要更长的时间。

图2自动驾驶的实现途径
在自动驾驶里面,我们实现自动驾驶,主要是这么两种途径:一个是基于车载自身传感器的「自主行走控制系统」;还有一个基于V2X获取前方信息的「协调型行走系统」,也就是所谓的汽车网联。再往上一层就是智能加上网联,当智能和网联这两个系统联合在一起,可能就是将来的自动驾驶系统。
2020年或者2025年,这个时间上都是相对来说比较含糊的。为什么?因为网联这条路,用什么样的方式,包括什么样的标准,到目前来说还具有很多模糊性,在技术上还没有完全准确的时间。所以,要将智能和网联这两条线合并到一条线的时间上,就不是那么准确了。

图3自动驾驶的商业路线
现在在自动驾驶技术的商业化路线方面,我们前面有的初级自动驾驶,也可以说是ADAS系统,在主机厂里面,现在主机厂里面一般采用SAE 1级、2 级,然后往3级、4级方向发展。0级在很早以前,90年代就有了。
然后在中级里面,像现在的特斯拉直接从2级开始。当然特斯拉从SAE 2级、3级开始也有它的产业基础,在美国那边汽车公司里面都已经进入了2级,它再从0级出发也是不符合时代的。所以它的表现也是属于比较正常的,当然特斯拉更多的是从2级自动化用了3级的 HMI(人机界面)系统,这样有一种跨界的感觉。
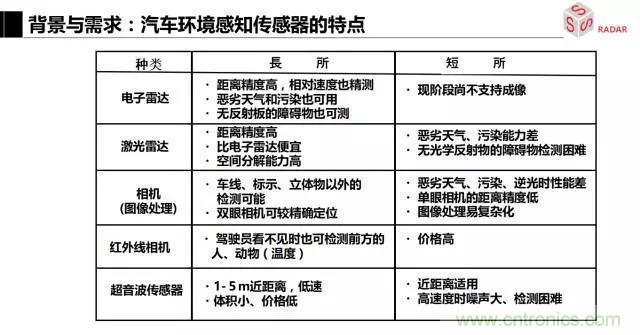
图4汽车环境感知传感器的特点
自动驾驶里面,智能的这部分更多是车载传感器的集合、传感器的融合以及应用。在传感器里面(如图4所示),车载传感器主要是分五种:电子雷达、激光雷达、相机、红外线相机、超声波传感器。其中,超声波由于探测距离太近,虽然现在搭载率很高,但是将来可能会更多的被取代。
在激光雷达方面,现在多线的激光雷达价格还相对比较高,而且这个价格什么时候降下来并不一定,我们很多人都想激光雷达在未来几年内价格能降下来,但是这个可能很难做到。当年毫米波雷达也是从90年代开始一直降价降到现在,终于从数万美金降到―百美金。所以说,这个时间的发展往往不一定如我们所期待的那么顺利。

图5现代车载雷达构成
在汽车电子雷达方面,现在汽车搭载的主要是往前看的前视雷达,有24G和77G两种远距离雷达。这个24G的里面,也有往后视的24G的雷达。24G和77G的雷达的区别点在于,24G分窄带和宽带两种雷达,77G 主要是窄带雷达,它的带宽比较窄。
77G、76G,虽然法规上允许最大1个GHz,但是77G雷达的带宽大概在500MHz 以内,带宽不够高的话,会带来距离分解能力不高的问题。24G 的宽带雷达当时在法规上最大可以到 2个GHz,也有说当时 26G可以用 4个GHz。这里带宽的提高使得分解能力提高很多。但是由于只有2G带宽的信息分辨能力、运算速度的限制和EU区域限制,带宽带来的效果并没有表现出来。
智能驾驶毫米波雷达
稍微介绍一下汽车雷达的历史,其实最早从70年代、80年代,大家就一直在做汽车车载毫米波雷达。汽车的智能化也不是最近才提起的话题,实际上在70年代的时候大家就想做汽车的智能化。
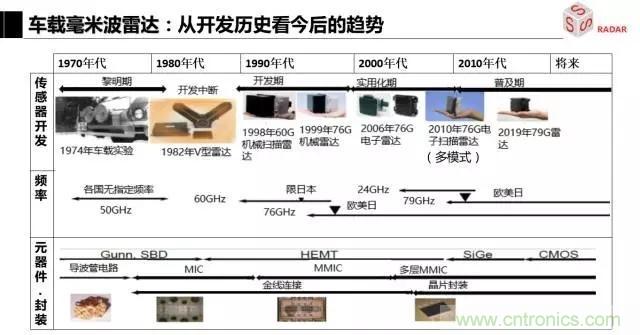
图6车载毫米波雷达的发展史
在图6中可以看到,70年代的时候汽车上面背着几个大脸盆似的天线,这个时候就开始想着做汽车智能化。1990年开始,进入90年代微电子技术的发展,一下子使得雷达小型成为可能,也是在这个时候雷达开始开发得快一点。
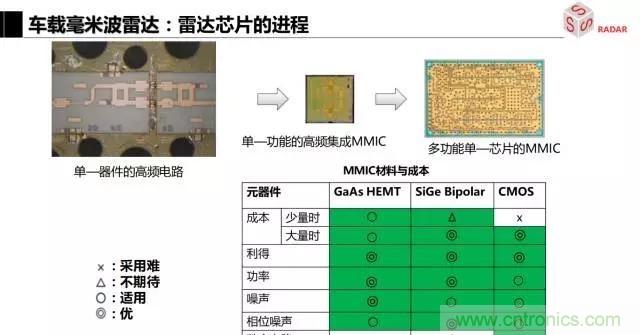
图7雷达芯片的进程
车载雷达里面有一个芯片材料,这个芯片从90年代开始,最早是用GaAs这种材料,现在是SiGe,在将来五到十年可能CMOS芯片会出来。用CMOS做的高频信号发生器,当材料变得越来越便宜的同时,它的功率、噪声、功放这方面的表现会越来越难控制,它对生产工艺的相对要求就会越来越高。
现在国外也在往CMOS这个方向转,但是刚刚起步阶段,相对来说制造工艺技术方面要求更高。我们要注意一点,当一种新的材料、新的技术导入的时候,在起步的前几年,它的价格肯定会比它的上一代暂时贵,例如CMOS芯片比SiGe芯片贵,但这是起步阶段必然的问题。
79GHz雷达技术
我们的下一代雷达会是什么?
我们反转来看过去历史的发展就会看到,现在我们使用的技术,其实就是十年前各个研究所、大学在开发的技术。也就是说,在将来下一个五年、十年,我们会用的技术基本上目标是定在79G毫米波雷达。国外5到10年前就已经开始做79G。
为什么会用79G?
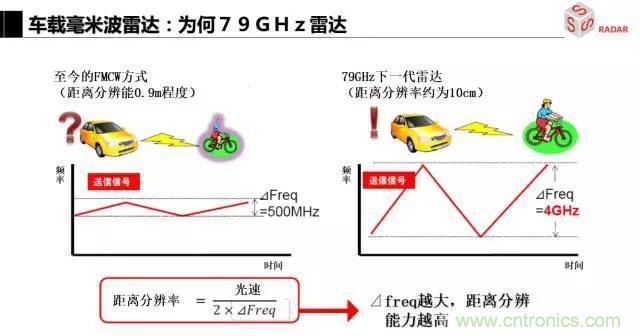
图8为何会是79GHz雷达?
如图8所示,我们现阶段用的77G的毫米波雷达,根据雷达的公式,带宽较窄的情况下,它的距离分辨率大概也就是1米的范围。
当带宽提高的话,我们可以看到在79G用了4个GHz,它的距离分辨率可以提高到很多。当距离分辨率提高到了10个厘米,两个物体前后左右相隔的距离差达到10个厘米也能测量出来的话,就不需要角度的分解了,也就是说不需要相控阵天线就可以把两个物体分开。这能够极大地提高道路上各种障碍物的分离检测能力,而不需要带上一个强大的相控阵天线。

图9自动驾驶用下一代车载雷达构成
在今后,由于79G雷达的出现,将来的智能驾驶的汽车就会前向还是24G、77G的远距离雷达,但在中间侧向有 4个79 的毫米波雷达,来实现环视。
79G的毫米波雷达具有高分解能力,使得在某些功能可以逐渐代替一些现有的光学传感器的性能。也就是说79G除了水平方向的高分解能力之外,同时可以做一个上下方向的79G毫米波雷达,水平和上下同时进行扫描,很容易实现毫米波的成像。
也就是说,很快(大概十年内)将会有一种很强大的毫米波成像雷达,这在很大的程度上会替代现有的光学传感器。
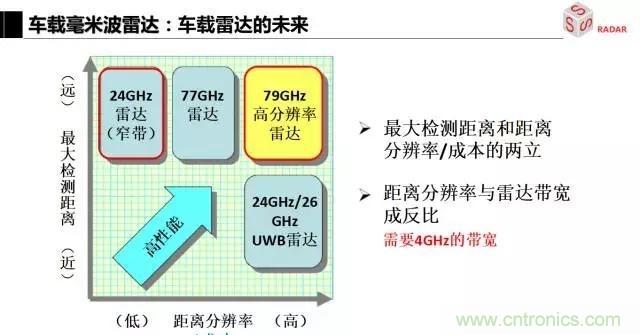
图10车载雷达的未来
图10是目前整个雷达在发展机制上区分出的几种雷达,这里列出来了24G、77G、79G三种。这几种雷达里面,主要考虑两种走向:
距离分辨率跟成本,也就是说在性价比这个方面;
最大检测距离。
从图 10的坐标中可以知道,将来的趋势有可能是从性能更好的方向上来说,会往79G走。还有一个性价比,价格最便宜的方向是24G,这在中国可能在一段时期里面都会存在。这跟欧美市场可能会有不一样的走向。因为欧美市场的话已经使用77G了,而国内的话,可能采取性能高的往79走、价格便宜的往24G走的路线。
79G的毫米波雷达会有什么好处呢?
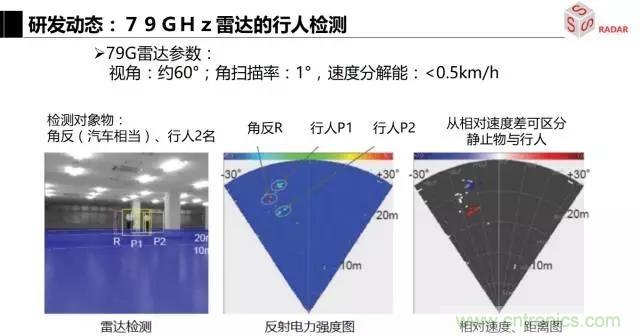
图11研发动态:79GHz雷达的行人检测
79G的毫米波雷达由于它可以做到4个G的带宽,在这4个G的带宽里面可以实现成像。比如说像这个室内,两个人和反射板(用于表示汽车),把它们放在一起,79G能够很精准的将其分解出来,当然图11这是通过机械式扫描来看这个79G的性能会怎样。在以前的雷达里面是看不到这些东西,与现在在医院里做CT成像是基本一样的。
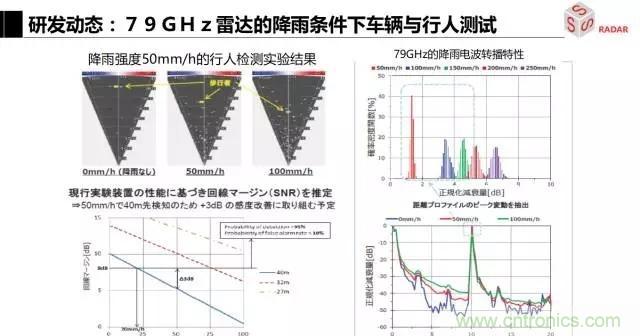
图12研发动态:79GHz雷达降雨条件下车辆与行人测试
当然79G也是电磁波雷达,由于频率越来越高,我们要考虑到电波在降雨或者是冰雪条件之下,传感器的性能也必然会衰减。
比如说行人行为检测,没降雨的时候,这一款雷达可以看到50米的话,下中雨的时候,同款雷达看人的距离会缩短到40米。也就是说,会有10米的衰减出现。因此,如果79G雷达要看得更远的话,在信噪比方面的性能还需要做进一步的增强,还要做很多的努力。
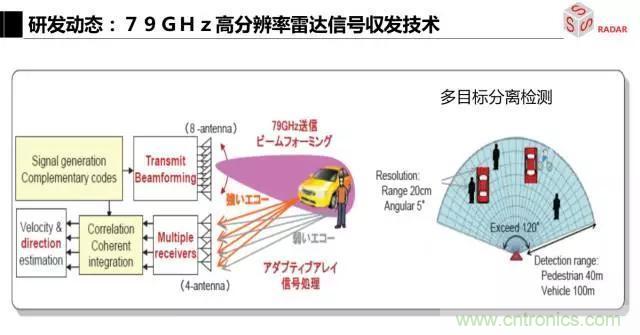
图13研发动态:79GHz 高分辨率雷达信号双收技术
刚才讲的79G,在没有相控阵的时候,它的分解能力就很高。而如果同时对79G雷达也做与现在77G 一样的相控阵天线,多发射多接收的话,这时候对多目标的分离检测能力除了距离上的分解还会有角度上的分解,对多目标的分离检测能力将会有大幅度的提高。
当然这个大幅度的提高的同时,也会带来一个很大的问题,就是多目标的分离检测。现在77G雷达用的是32或64个目标,在79G的时候雷达内部信号处理就不是同时跟踪764个目标,而是128个或者更多的目标数。我们同时跟踪的目标数越多,对雷达内部的信号处理芯片运算能力要求会成指数增长。这是79G雷达开发需要考虑的问题。
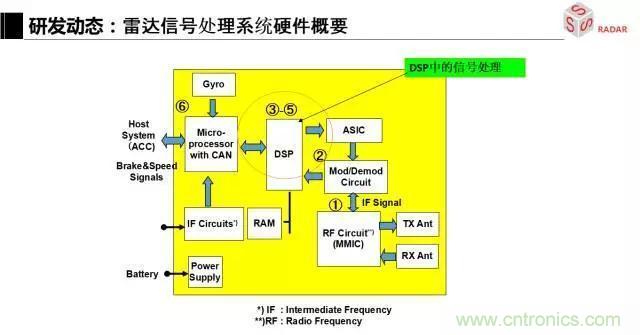
图14研发动态:雷达信号处理系统硬件概要
雷达信号处理可以集成在一个DSP芯片里面。这在一个芯片里面做信号处理的话,除了刚才多目标数量的影响之外,还有下雨天气,道路环境噪声的影响,在这里面除了对多目标的分离检测信号做分离处理,还要做进一步的跟踪处理。
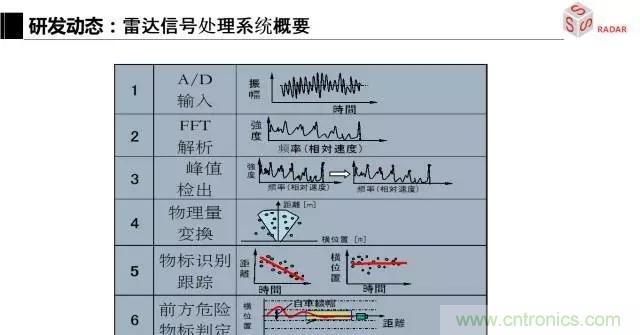
图15研发动态:雷达信号处理系统概要
还有如自动驾驶里的车辆惯导,通过惯导来推算前方障碍物对你来说具有多大的危险性。这个危险性的判断,是雷达信号处理的一部分。也就是说在雷达信号处理里面,会在雷达的内部做图15 中所提到的六项信号处理。
随着现在雷达波形越来越复杂,从第二个阶段开始信号处理都已经是运算负荷很重的信号处理,包括我们现在用的最新的雷达,这也是79G雷达需要克服的技术难题。
结论
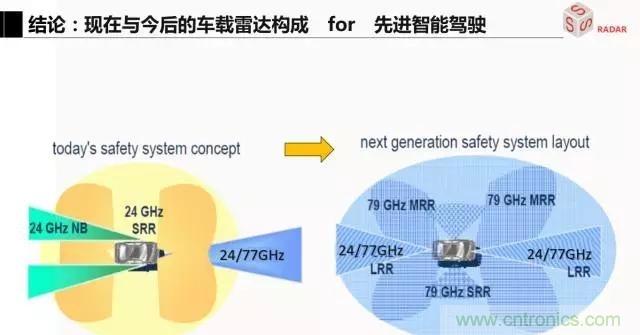
图16现在与今后的车载雷达构成对比
如图16所示,今后我们感觉车载雷达,它肯定会从这么几个方向来发展。
下一代的感知系统里面,感知系统会往哪个方向走,取决于毫米波雷达成像技术走得有多快。只有毫米波雷达往成像方向走了以后,整个感知系统,对于将来的自动驾驶会起到很多引领作用。
当然毫米波雷达成像,在军用上早就已经有,只不过是成本方面的问题。现在79G已经实现了距离方面的扫描,即现在是水平方面,只要加一个垂直方向的维度,也就是最多是以两个79G的成本来做,就可实现毫米波的成像。现在79G也就在一两百美金的范围,乘以二也就是四五百美金,毫米波雷达的成像在今后五年里面会成功出来。
推荐阅读:

