
【导读】随着电子技术的发展,汽车电子化程度不断提高,通常的机械系统已经难以解决某些与汽车功能要求有关的问题,而被电子控制系统代替。
前言
随着电子技术的发展,汽车电子化程度不断提高,通常的机械系统已经难以解决某些与汽车功能要求有关的问题,而被电子控制系统代替。

汽车传感器
传感器作为汽车电控系统的关键部件,它直接影响汽车的技术性能的发挥。现代汽车已将传感器技术扩展到底盘、车身和灯光电气系统上了。这些系统采用的传感器有100多种。这些传感器主要分布在发动机控制系统、底盘控制系统和车身控制系统中。
传感器的作用就是根据规定的被测量的大小,定量提供有用的电输出信号的部件,亦即传感器把光、时间、电、温度、压力及气体等的物理、化学量转换成信号的变换器。
汽车传感器的种类
汽车传感器的种类这么多,常见的有哪些呢?下面来介绍分布在不同车辆控制系统中的一些常用的汽车传感器。
发动机控制用传感器
发动机控制用传感器有许多种,其中包括温度传感器、压力传感器、转速和角度传感器、流量传感器、位置传感器、气体浓度传感器、爆震传感器等。这类传感器是整 个发动机的核心,利用它们可提高发动机动力性、降低油耗、减少废气、反映故障等。

由于发动机用传感器工作在发动机振动、汽油蒸气、污泥和泥水等恶劣环境中,因此它们耐恶劣环境技术指标要高于一般的传感器。对于它们的性能指标要求有很多种,其中最关键的是测量精度与可靠性,否则由传感器检测带来的误差最终将导致发动机控制系统失灵或故障。
1.温度传感器
温度传感器主要用于检测发动机温度、吸入气体温度、冷却水温度、燃油温度以及催化温度等。温度用传感器有线绕电阻式、热敏电阻式和热偶电阻式三种主要类型。三种类型传感器各有特点,其应用场合也略有区别。
线绕电阻式温度传感器的精度高,但响应特性差;
热敏电阻式温度传感器灵敏度高,响应特性较好,但线性差,适应温度较低;
热偶电阻式温度传感器的精度高,测量温度范围宽,但需要配合放大器和冷端处理一起使用。
已实用化的产品有热敏电阻式温度传感器(通用型-50℃~130℃,精度1.5%,响应时间10ms;高温型600℃~1000℃,精度5%,响应时间10ms)、铁氧体式温度传感器(ON/OFF型,-40℃~120℃,精度2.0%)、金属或半导体膜空气温度传感器(-40℃~150℃,精度2.0%、5%,响应时间20ms)等。
2.压力传感器
压力传感器主要用于检测气缸负压、大气压、涡轮发动机的升压比、气缸内压、油压等。吸气负压式传感器主要用于吸气压、负压、油压检测。汽车用压力传感器应用较多的有电容式、压阻式、差动变压器式(LVDT)、表面弹性波式(SAW)。
电容式压力传感器主要用于检测负压、液压、气压,测量范围20~100kPa,具有输入能量高,动态响应特性好、环境适应性好等特点;
压阻式压力传感器受温度影响较大,需要另设温度补偿电路,但适应于大量生产;
LVDT式压力传感器有较大的输出,易于数字输出,但抗干扰性差;
SAW式压力传感器具有体积小、质量轻、功耗低、可靠性高、灵敏度高、分辨率高、数字输出等特点,用于汽车吸气阀压力检测,能在高温下稳定地工作,是一种较为理想的传感器。
3.流量传感器
流量传感器主要用于发动机空气流量和燃料流量的测量。空气流量的测量用于发动机控制系统确定燃烧条件、控制空燃比、起动、点火等。空气流量传感器有旋转翼片式(叶片式)、卡门涡旋式、热线式、热膜式等四种类型。
旋转翼片式(叶片式)空气流量计结构简单,测量精度较低,测得的空气流量需要进行温度补偿;
卡门涡旋式空气流量计无可动部件,反映灵敏,精度较高,也需要进行温度补偿;
热线式空气流量计测量精度高,无需温度补偿,但易受气体脉动的影响,易断丝;
热膜式空气流量计和热线式空气流量计测量原理一样,但体积少,适合大批量生产,成本低。
空气流量传感器的主要技术指标为:工作范围0.11~103立方米/min,工作温度-40℃~120℃,精度≤1%。
燃料流量传感器用于检测燃料流量,主要有水轮式和循环球式,其动态范围0~60kg/h,工作温度-40℃~120℃,精度±1%,响应时间小于10ms。
4.位置和转速传感器
位置和转速传感器主要用于检测曲轴转角、发动机转速、节气门的开度、车速等。目前汽车使用的位置和转速传感器主要有交流发电机式、磁阻式、霍尔效应式、簧片开关式、光学式、半导体磁性晶体管式等,其测量范围0°~360°,精度±0.5°以下,测弯曲角达±0.1 。
车速传感器种类繁多,有敏感车轮旋转的、也有敏感动力传动轴转动的,还有敏感差速从动轴转动的。当车速高于100km/h时,一般测量方法误差较大,需采用非接触式光电速度传感器,测速范围0.5~250km/h,重复精度0.1%,距离测量误差优于0.3%。
5.气体浓度传感器
气体浓度传感器主要用于检测车体内气体和废气排放。其中,最主要的是氧传感器,实用化的有氧化锆传感器(使用温度-40℃~900℃,精度1%)、氧化锆浓差电池型气体传感器(使用温度300℃~800℃)、固体电解质式氧化锆气体传感器(使用温度0℃~400℃,精度0.5%)。
另外还有二氧化钛氧传感器。和氧化锆传感器相比,二氧化钛氧传感器具有结构简单、轻巧、便宜,且抗铅污染能力强的特点。
6.爆震传感器
爆震传感器用于检测发动机的振动,通过调整点火提前角控制和避免发动机发生爆震。可以通过检测气缸压力、发动机机体振动和燃烧噪声等三种方法来检测爆震。
爆震传感器有磁致伸缩式和压电式。磁致伸缩式爆震传感器的使用温度为-40℃~125℃,频率范围为5~10kHz;压电式爆震传感器在中心频率5.417kHz处,其灵敏度可达200mV/g,在振幅为0.1g~10g范围内具有良好线性度。
底盘控制用传感器
底盘控制用传感器是指分布在变速器控制系统、悬架控制系统、动力转向系统、防抱制动系统中的传感器,在不同系统中作用不同,但工作原理与发动机中传感器是相同的,主要有以下几种形式传感器:
1.变速器控制传感器
多用于电控自动变速器的控制。它是根据车速传感器、加速度传感器、发动机负荷传感器、发动机转速传感器、水温传感器、油温传感器检测所获得的信息经处理使电控装置控制换档点和液力变矩器锁止,实现最大动力和最大燃油经济性。
2.悬架系统控制传感器
主要有车速传感器、节气门开度传感器、加速度传感器、车身高度传感器、转向盘转角传感器等。根据检测到的信息自动调整车高,抑制车辆姿势的变化等,实现对车辆舒适性、操纵稳定性和行车稳定性的控制。
3.动力转向系统传感器
它是根据车速传感器、发动机转速传感器、转矩传感器等使动力转向电控系统实现转向操纵轻便,提高响应特性,减少发动机损耗,增大输出功率,节省燃油等。
4.防抱制动传感器
它是根据车轮角速度传感器,检测车轮转速,在各车轮的滑移率为20%时,控制制动油压、改善制动性能,确保车辆的操纵性和稳定性。
车身控制用传感器
采用这类传感器的主要目的是提高汽车安全性、可靠性、舒适性等。
应用于自动空调系统中的多种温度传感器、风量传感器、日照传感器等;
安全气囊系统中加速度传感器;亮度自控中光传感器;
用于门锁控制中的车速传感器;
用于亮度自动控制中的光传感器;
用于倒车控制中的超声波传感器或激光传感器;
用于保持车距的距离感器;
用于消除驾驶员盲区的图象传感器等。
死角报警系统中超声波传感器;图像传感器等。
导航系统用传感器
随着基于GPS/GIS(全球定位系统和地理信息系统)的导航系统在汽车上的应用,导航用传感器这几年得到迅速发展。导航系统用传感器主要有:确定汽车行驶方向的罗盘传感器、陀螺仪和车速传感器、方向盘转角传感器等。
无人驾驶技术的汽车传感器
无人驾驶技术现如今其实非常成熟了,汽车如何能对现实中复杂的交通状况了如指掌,如何可以像人的眼睛和大脑一样灵活应变。关键就在需要各种各样的传感器合作来解决,它们最终将监测到的数据传给高精密的处理器,识别道路、标示和行人,做出加速、转向、制动等决策。
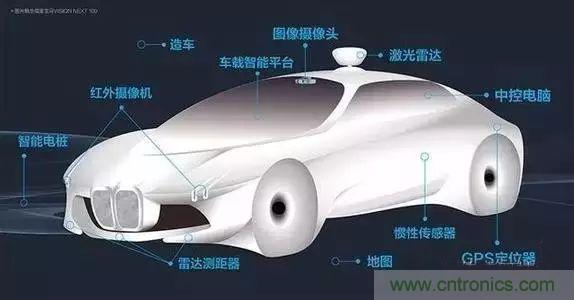
在智能感知识别的部分,车载光学系统和车载雷达系统是保证行车安全最为重要的系统,目前,主流的用于周围环境感测的传感器有激光雷达(LiDAR)、毫米波雷达(millimeter wave)、视觉传感器三种。
激光雷达(LiDAR)
通过扫描从一个物体上反射回来的激光来确定物体的距离,可以形成精度高达厘米级的3D环境地图,因此它在ADAS(先进驾驶辅助系统)及无人驾驶系统中起重要作用。从当前车载激光雷达来看,机械式的多线束激光雷达是主流方案,但受制于价格高昂的因素尚未普及开来。
在百度无人驾驶汽车车身上,除了部署了毫米波雷达、视频等感应器,其车顶就安置了一个体积较大、价值70万余人民币的64位激光雷达,谷歌同样也是采用的相同高端配置激光雷达。车载激光雷达系统的优劣主要取决于2D激光扫描仪的性能。激光发射器线束的越多,每秒采集的云点就越多。然而线束越多也就代表着激光雷达的造价就更加昂贵。激光雷达除了成本高昂,遇到烟雾介质以及雨雪天气中表现一般,将掣肘它的发挥。
与雷达原理相似,激光雷达使用的技术是飞行时间(TOF,Time of Flight)。 具体而言,就是根据激光遇到障碍物后的折返时间,计算目标与自己的相对距离。激光光束可以准确测量视场中物体轮廓边沿与设备间的相对距离,这些轮廓信息组成所谓的点云并绘制出3D环境地图,精度可达到厘米级别,从而提高测量精度。

激光雷达作为“机械之眼”,也大量应用在无人机、机器人等等方向上 。相比于摄像头,激光雷达的最大优势在于使用环境限制较小,即不管在白天或是夜晚都能正常使用。
毫米波雷达(millimeter wave)
毫米波是指30~300GHz频域(波长为1~10mm)的电磁波,毫米波的波长介于厘米波和光波之间,因此毫米波兼有微波制导和光电制导的优点。同厘米波导引头相比,毫米波导引头具有体积小、质量轻和空间分辨率高的特点。
与红外、激光、电磁等光学导引头相比,毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候(大雨天除外)全天时的特点,这能与激光雷达的作用产生互补。另外,毫米波导引头的抗干扰、反隐身能力也优于其他微波导引头 。
缺点是毫米波雷达由于波长原因,探测距离非常有限,也无法感知行人,而激光雷达可以对周边所有障碍物进行精准的建模。为了克服不同缺点,因此势必要将这些传感器组合在一起。
目前看毫米波雷达也是智能汽车ADAS 系统的标配传感器,按照目前主流分类,毫米波雷达可分为24GHz雷达和77GHz雷达。参照其特性,通常车辆周围的车辆检测使用24Ghz,前方车辆检测使用77GHz。
以中国的实际国情以及芯片研发进度等行业特点来看,未来三年内24GHz毫米波雷达在国内仍有市场空间。望眼全球,我国77GHz毫米波雷达的大规模应用将稍微推后。
视觉传感器
ADAS应用摄像头作为主要传感器是因为摄像头分辨率高于其他传感器,可以获取足够多的环境细节,帮助车辆进行环境认知,车载摄像头可以描绘物体的外观和形状、读取标志等,这些功能其他传感器无法做到。
但是摄像头受环境因素以及外部因素影响较大,比如隧道中光线不足,天气因素导致的视线缩小等。
目前摄像头的应用主要有:单目摄像头、后视摄像头、立体摄像头或称双目摄像头、环视摄像头。
当然为了提高环境感知的准确度,通常需要多种传感器的组合,最终提供一个稳定耐用的解决方案。
当下比较典型的就是毫米波雷达、激光雷达和车载摄像头,其他的超声波技术和红外线技术以及这些技术的算法融合都将让传感器产业带来巨大的市场。不过毋庸置疑,在汽车实现完全智能化的这几年中,传感器产业链应该是最先获得收益的。
未来的汽车传感器技术的发展趋势是微型化、多功能化、集成化和智能化。 Mems汽车传感器已开始逐步取代基于传统机电技术的传感器,将成为世界汽车电子的重要构成部分。

