
【导读】儿童和狗能够毫不费力地辨别方向以及控制体操动作。有些人认为这就像“小孩游戏”一样简单,直到他们试图使机器人模仿这种本领。人类定向系统的复杂性不可思议,当我们在地面上时其表现非常出色。相反,在飞机上时,我们则处于一种不熟悉的三维环境下,再加上缺少视觉定向参考,就难以或不可能管理空间(距离)方位。5%至10%的一般航空事故与空间定向障碍有关,其中90%是致命的。
微机电系统(MEMS)惯性传感器的设计在本质上对运动非常敏感,可有效检测和处理线性加速、磁航向、海拔和角速率信息。为充分利用惯性传感器的性能潜力,设计者必须熟悉总体机械系统,密切关注应用中的运动源和谐振。
本文介绍了MEMS惯性传感器(例如陀螺仪和加速计)如何帮助人或机器克服空间定向障碍。文章介绍了外力和运动对系统工作的影响,以及元件布局和安装条件(空间关系)对MEMS惯性传感器性能的直接影响。系统配置各有不同(例如电路板尺寸、材质、安装方法),设计者需要根据具体应用设计特定的方案。文章还介绍了如何检测并减少错误的惯性信号。对于实际环境中出现有害的移动信号和系统共振的情况,文章给出增强传感器系统工作的实用建议。

人类的平衡
本文首先从讨论平衡开始,以人类耳朵为例。图1中的耳蜗是听觉器官。耳膜通过我们身体中一些最小的骨骼振动耳蜗。耳蜗长有毫毛或纤毛,并且充满液体。当耳蜗移动时,液体由于惯性的原因并不移动。纤毛感测这种运动差异,并将神经脉冲传输至我们的脑部,表现为声音。
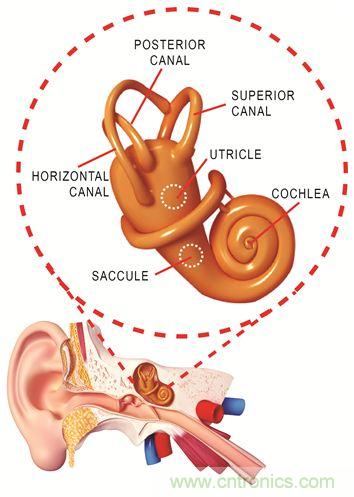
图1. 人体平衡和听力是内耳中复杂平衡器官的一部分。
人耳也包含用于平衡的运动检测系统。三个半规管的作用类似于相互垂直的陀螺仪,感测并将脉冲信号送至脑部,表示人的平衡状态。不幸的是,我们感测运动的方式存在局限性。
如果运动小于2度每秒时,我们将感测不到;如果稳定运动的时间超过20至25秒,我们则会停止感测运动。这种人类局限性会引起错乱。在内耳中存在其他两个感觉器官:椭圆囊感测线性加速度,球囊感测重力。耳朵中的全部5个感觉器官向脑部传送身体方位和运动信息,帮助我们平衡。这和眼睛一起,帮助我们维持平衡,并且在头部运动或身体旋转时使我们的眼睛盯住目标。
飞机中的飞行员与空间定向
飞行员都知道不要靠直觉(即不依赖于内部感观)飞行,而是要依赖于飞行仪表。这非常难以掌握,尤其在紧急和恐慌的情况下。
根据美国联邦航空管理局(FAA)的信息,飞行员受一种称为“墓地盘旋”的常见错觉影响。这与有意识或无意识长时间倾斜转弯后恢复水平飞行有关。例如,当飞行员开始倾斜向左转弯时,最初会感觉到在相同方向的转弯;如果继续向左转弯(约20秒或更长),飞行员就会觉得飞机不再向左转弯。此时,如果飞行员试图将机翼调整水平,这一动作将会使其感觉到飞机正在向相反的方向(向右)转弯和倾斜。如果飞行员相信向右转弯的错觉(会非常强烈),他将试图纠正右转的感觉,从而重新进入最初的左转。不幸的是,发生这一切时,飞机仍在左转,并正在下降。正在转弯时拉起控制杆并增加动力不是一个好主意——只能使飞机更向左转。如果飞行员没有认识到错觉,未能使机翼水平,飞机将继续左转并降低高度,直到撞击地面(参考文献2)。
问题是MEMS陀螺仪和加速计能够帮助飞行员克服空间定向障碍吗?
MEMS惯性传感器是解决之道
人体会受到欺骗,并且在有些情况下必须依赖于外部帮助才能实现良好平衡。由于人体容易受空间定向障碍的影响,MEMS惯性传感器提供了一套解决方案。可利用安装正确的惯性传感器建立惯性坐标系参考,帮助用于判断方向和/或运动。利用这些器件可避免错误感观隐患。
为确保惯性传感器工作的可靠性,必须将其正确安装和定向。对于装配惯性传感器,有一套良好的设计实践,只要应用得当,可形成高性能系统。
装配MEMS惯性传感器的实用方法
从一开始就理解基本原理至关重要:发生振动时,惯性传感器在PCB上的位置可能是首先要考虑的事项。因此,惯性传感器如何安装、安装条件,以及其放置位置/方向,均会影响总体机械系统特性。简而言之,如果设计考虑不周,发生运动时惯性信号性能将下降。
注意:也强烈建议分析总机械系统及其对惯性传感器性能的影响。
布置事项
首先从方向开始。相对于一定的基准(常以选定的PCB侧面为参考)放置惯性传感器,并在贴装回流焊接过程中保证定位不变是一项极具挑战性的工作。此外,每级装配(传感器到封装、封装到PCB、PCB到外壳等)都会增加安装误差。由于传感器装配方位(相对于惯性坐标系)决定系统精度,所以此时必须将所有误差降至最小。图2所示为方位不正确引起的误差。软件可校准装配误差,但如果不限制误差源,高阶误差会降低传感器性能。
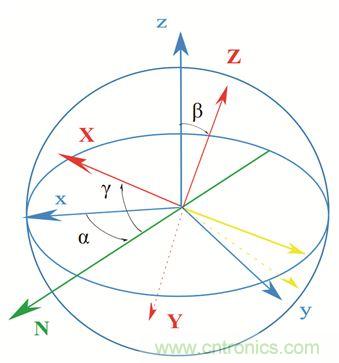
图2. 惯性传感器装配误差示意。图片来源:Juansempere,en.wikipedia
热机械应力是一种潜在误差源,可在惯性传感器上形成热梯度,引起封装应力;以及在PCB上形成热梯度,将应力传递至惯性传感器。这两种热效应有时难以区分,有些情况下则两者均有。结果造成封装应力,可引起偏差(及偏移)和灵敏度性能误差。发热量较大的器件应远离惯性传感器,但在实际的紧凑的PCB设计中,有时难以满足这一要求。无论如何,必须尽一切努力使惯性传感器远离热源,将温度梯度降至最小。
装配事项
贴装元件时要求了解和应用适合特定回流焊的最佳温度。由于这些操作通常侧重于焊接强度、可靠性和产量(即成本),有时会忽略惯性传感器需要特殊考虑的事项。例如,非最优化的冷却阶段会对惯性传感器封装形成残余应力,从而导致性能下降,造成超出指标的偏差和缩放因子。
PCB的保形涂层常用于防止电路受潮、化学污染(例如盐)以及其他破坏性影响。不建议惯性传感器器件采用保形涂层。涂层会改变传感器的机械条件,影响总机械系统特征。而且难以控制保形涂层的应用(即黏度、干燥厚度)。
机械系统事项
外部运动源(例如惯性信号、冲击、振动)会意外激励PCB产生谐振,在最坏的工作条件下,可能发生惯性信号实际是系统谐振引起的假象的情况。这些错误的信号作为噪声,掩盖惯性信号(例如移动和/或振动)。当发生谐振条件时,惯性传感器相对于PCB上波谷、波节、波峰的位置会造成信号检测性能下降。
图3所示为惯性传感器在PCB上的两种布置方法,标出了主要的谐振模式。左下方位置的传感器位于节区(蓝绿色)。相对于PCB右上方的传感器,该位置的谐振相关角速率减小。第二个惯性传感器位于节区与波谷(以深蓝色表示)斜面之间的边缘处。该传感器处于不平衡位置,在谐振条件下更容易发生加速度和角速率信号畸变。
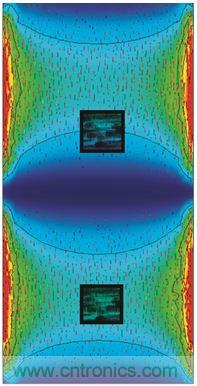
图3. PCB谐振及惯性传感器布置模拟。下方节区内传感器位置的谐振相关角速率信号被衰减。上方的第二个传感器处于不平衡位置,更容易发生加速度和角速率信号畸变。感谢FEKO提供PCB图像,版权归其所有。
尽管有很多技术可用于减轻PCB谐振(例如电路板强化、系统阻尼、振动隔离),但仍需对总机械系统进行全面分析。应执行有限元分析(FEA),以识别所有潜在谐振模式及其相关的频率和品质因数。然后即可实施好的设计技巧,增强性能。
结论
本文回顾了运动,理解了MEMS惯性传感器对于帮助克服空间定向障碍的重要性。本文也讨论了不好或不理想的布置、安装条件及系统谐振对MEMS惯性传感器性能的不利影响。遵循正确的设计考虑事项,完全可“绕开”这些“困难重重”的事件,实现MEMS惯性传感器应有的性能。
推荐阅读:

