
【导读】解析二相混合式步进电机高性能驱动控制方法,从而实现减小低频振荡和改善矩频特性的目的。在常用升降速控制技术的基础上,把指数形式结合台阶模式的加减速控制方法加以改进。以Logistic增长方程为模型,提出一种基于调频调压驱动模式的电流补偿控制算法,即电机的供电电压实时跟踪运行频率的驱动方式。实验结果显著改善低频稳定性和矩频特性,具有一定的研究和经济价值。
步进电机是一种数字电机,具有无累积误差、性价比高等优点,被广泛应用于生活和生产领域中。异于其他电机,步进电机必须使用驱动器才能工作。步进电机运行时存在低频振荡和矩频特性,是设计驱动系统时必须考虑的两大难题。另外,步进动电机需要有升降速过程才能运行平稳。起动时,如果加在电机上的脉冲信号频率过高,则会出现失步或振荡,电机会抖动并有呼啸声。驱动器的性能影响着步进电机的发展前景,因此研究一种高性能步进电机驱动方法具有重要的实际意义。
1 驱动系统的原理与设计
本系统的设计方案采用调频调压驱动方式,系统的硬件电路按功能来划分,主要包含以STM32F103为核心的主控模块、功率驱动电路、调频调压驱动电源和电机电流检测模块。基本框图如图1所示。
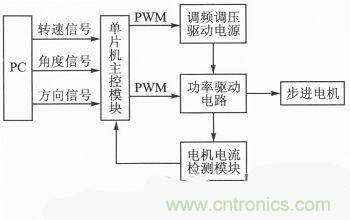
图1:步进电机驱动系统原理框图
驱动系统的核心是微处理器控制模块。由STM32F103单片机及其外设电路组成,用于实现电机PWM时序信号的输出、转速和方向的控制、软件控制算法的实现、与计算机通信等功能。增强型STM32单片机有80个GPIO口,高达72 MHz的内部时钟频率的定时器,通过改变PWM的频率实现电机速度的变化,完全满足驱动的设计要求。
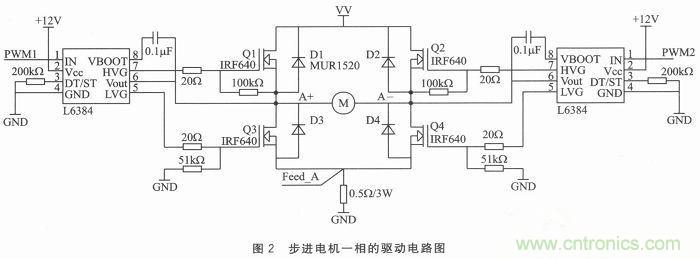
二相混合式步进电机需要双极性驱动方式才能工作,即绕组在一个周期内需要有正反两个方向的电流流过。采用H桥电路可以很容易解决电机双向通电的问题,二相步进电机需要8个开关管构成两个H桥,其中一相的H桥驱动电路如图2所示。MOS管驱动采用驱动芯片L6384,2片L6384和4个功率MOSFET管IFR640构成H桥。Q1、Q4和Q2、Q3轮流导通,绕组中的电流方向在周期内不断地改变。
二相混合式步进电机需要双极性驱动方式才能工作,即绕组在一个周期内需要有正反两个方向的电流流过。采用H桥电路可以很容易解决电机双向通电的问题,二相步进电机需要8个开关管构成两个H桥,其中一相的H桥驱动电路如图2所示。MOS管驱动采用驱动芯片L6384,2片L6384和4个功率MOSFET管IFR640构成H桥。Q1、Q4和Q2、Q3轮流导通,绕组中的电流方向在周期内不断地改变。
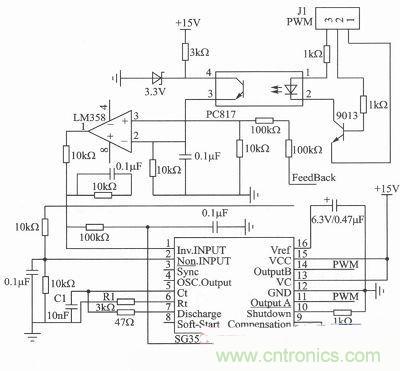
可调电源电路采用专用集成PWM控制芯片SG3525实现。调频调压电路如图3所示,控制信号PWM由J1输入,实现光耦调节,与输出信号共同反馈到SG3525的反相输入端和补偿端,用以改变11脚和14脚输出的PWM的占空比,使得输出稳定。C1和R1为片内振荡器外接电容、电阻,可设定输出PWM波的斩波频率,本系统斩波频率为60 kHz。11和14脚输出PWM控制后级功率管的“开”和“关”,实现绕组充放电,设计中采用220 V的市电输入,输出 0~60 V/4 A。
2 升降速控制方式
若m相步进电机驱动脉冲的频率为f,转子有Zr个齿,则电机的转速可 其中c=f1-f0,f1=a/b,常数b决定f-t曲线的变化规律,同样也影响加减速的快慢。式(6)通常作为理论推导的最合适的升降速控制曲线,即指数加减速曲线。指数曲线是矩频特性的一种近似,能很好地利用低频转矩恒定的优势,但是高速加速时仍会出现转矩大幅度下降,导致加速至高速困难。为更好地利用指数曲线的优点,弥补指数曲线的缺陷,提出指数形式结合台阶模拟加减速方式和快速台阶模式减速方式。整个加速和减速过程如图4所示。加速和减速采用不同的曲线控制。加速分为两段,首先利用指数形式加速快的优点,当达到一定速度时,再利用台阶模式加速,此处B点取目标频率的80%,加速过程中的台阶比较密,易于电机加速;减速过程中只采用台阶形式减速,因为电机具有定位力转矩特性,取fm的20%作为一个台阶,电机不会发生过冲,复杂的减速控制曲线反而会影响减速时间。
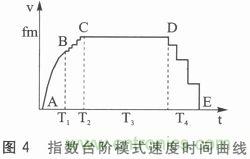
台阶法在软件编程中易于实现,加减速时间得到了有效控制。减速和加速采用同一个曲线会影响减速时间,合理利用步进电机的定位转矩特性,可使电机快速地停止,提高电机的效率。
3 电流补偿控制
常用的斩波恒流驱动方式的原理是采用电流波形补偿控制技术,只不过参考电流是固定值,参考文献和提出了改变电流参考波形的补偿控制技术,在绕组供给值较小时,通过自动切换参考电流波形的方式实现增大高频牵出转矩。本文在研究该技术的基础上,提出一种基于调频调压方式的实时电流补偿控制方法。不仅提高高频性能,在电机低速时也能迅速降低注入绕组的电流,保证低频平稳运行。
二相混合式步进电机给定的半步工作方式的理想参考电流波形如图5所示,电流能达到设定值ia。但是由于绕组是感性元件,实际电流的波形如图6所示,不是完全的方波形式,图中的阴影部分是电流减少的部分。这种现象随着电机运行频率的增大变得更加明显。当电机的频率达到电机临界值时,电机进入电流不可控频段,阴影部分的面积急速剧增,电机转矩出现明显下降。
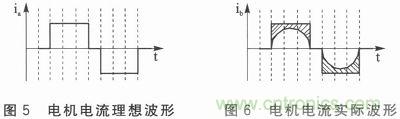
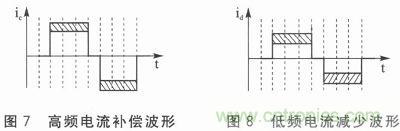
如图7阴影部分所示,电机高频运行时,为使电机绕组在短时间内仍能获得足够驱动电机运转的能量,在原先设定的电流波形的基础上额外增加供给电流,补偿减少的部分,提高相应的牵出转矩。低频时,为防止电流过剩,导致低频振荡,实时减少电流供给,如图8阴影部分所示。
保证电流的有效补给,f与u的变化呈现一个非线性关系模型,并与Logistic生物增长模型近似逼近。逻辑斯谛是一类非线性回归模型,提出这个模型的初衷是为了解释新物种在生态系统的增长变化趋势。当一个物种迁徙到一个陌生的生态系统,而且该物种的起始总数量小于新的生态系统的最大容纳量,则数量会增长,增长趋势满足逻辑斯谛方程。Logistic模型表达式为
式中x是自变量,y是x的函数,a、β、k是待定的常数。
物种到达一个新环境后的增长趋势如图9所示。从最初的起始值增长至平衡值,即式(7)中的常数a;β决定初始值的大小,β大于0时起始值落于最大值的下方,等于0时y为一条直线,小于0时起始值大于最大值a;而k是增长快慢的常数,k越大增长速度越快,且k只能为正数。
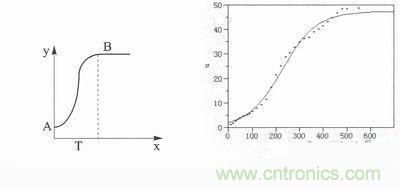
图9:增长趋势模型图
电机的绕组电压与频率的最佳曲线关系如图10所示。
由此得出电压和频率的驱动方程。
式中f为频率,u为电压,a、b和c为驱动系数,e为自然对数的底数。在f的增大过程中,u的变化趋势是先缓慢,再急剧,最后慢慢趋近于a,即设定的最大驱动电压值。
4 实验与结论
电机选用无锡三拓二相混合式步进电机57HS5125A4,额定电流2.5 A,最高起动频率约为200 Hz,步距角1.8°。若PWM最终信号频率设置为500 Hz,则f=0.8×500 Hz=400 Hz。在加速至400 Hz时采用台阶缓慢升速;减速过程由20%余量的台阶实现。选取合适的b值可以确定加速时间,b取0.05,加速时间约为0.3 s,减速时间为0.05 s,加速不失步,上升快而稳,是一种比较合适的升速曲线;减速没有过冲现象。二者形成最佳升降速控制曲线。
该设计方案已做成实物并在使用之中,测得某一相绕组电压和频率之间的波形变化关系,如图11所示。频率和电压采用逻辑斯谛模型电压控制方式,绕组脉冲信号的频率越高,供电电压也越来越高,电流实时补偿,波形毛刺较小,验证了本方案的正确性。
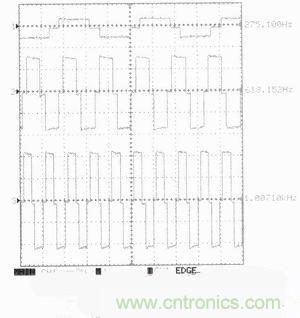
图11:实测绕组变化图
相关阅读:
国内现行轨道交通安全门系统驱动电机控制方案
电机控制实时性能与效率的智能优化方案
网友分享:基于Audrinode 的直流电机控制

